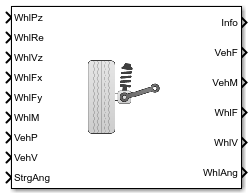
Independent Suspension - MacPherson
Независимая подвеска Макферсона
Описание
Блок Independent Suspension - MacPherson реализует независимое временное отстранение Макферсона для нескольких осей с несколькими дорожками на ось.
Блок моделирует податливость приостановки, затухание и геометрические эффекты как функции относительных положений и скорости транспортного средства и поставщика услуг колеса со специфичной для оси податливостью и затуханием параметров. Используя податливость приостановки и затухание, блок вычисляет силу приостановки на транспортное средство и колесо. Блок использует систему координат Z-down (заданный в SAE J670).
| Для каждого | Можно задать |
|---|
|
Ось
|
|
|
Дорожка
|
|
Блок содержит хранящие энергию пружинные элементы и рассеивающие энергию элементы демпфера. Это не содержит хранящие энергию массовые элементы. Блок принимает, что (перепрыгиваемое) транспортное средство и колесо (неперепрыгиваемые) блоки, соединенные с блоком, хранит связанную с массой энергию приостановки.
Эта таблица суммирует настройки параметров блоков для транспортного средства с:
| Параметр | Установка |
|---|
| Number of axles, NumAxl | 2 |
Number of tracks by axle, NumTracksByAxl | [2 2] |
| Steered axle enable by axle, StrgEnByAxl | [1 0] |
| Anti-sway axle enable by axle, AntiSwayEnByAxl | [1 0] |
Податливость приостановки и затухание
Блок использует линейную пружину и демпфер, чтобы смоделировать вертикальные динамические эффекты системы подвески. Используя относительные положения и скорости транспортного средства и поставщика услуг колеса, блок вычисляет вертикальные силы приостановки на колесо и транспортное средство. Блок использует линейное уравнение, которое связывает вертикальное затухание и податливость к высоте приостановки, скорости изменения высоты приостановки и абсолютному значению держащихся углов.
Блок реализует это уравнение.
Коэффициент демпфирования, c, зависит от установки параметра Enable active damping.
Установка Enable active damping | Затухание |
|---|
off | Постоянный, c = cza |
on | Интерполяционная таблица, которая является функцией активного рабочего цикла демпфера и скорости привода
|
Блок принимает, что элементы приостановки не имеют никакой массы. Поэтому силы приостановки и моменты обратились к транспортному средству, равны силам приостановки, и моменты применились к колесу.
Блок устанавливает положения колеса и скорости, равные транспортному средству боковые и продольные положения и скорости.
Уравнения используют эти переменные.
| Fwza,t, Mwza,t | Сила приостановки и момент применилась к колесу на оси a, отследите t вдоль зафиксированной колесом оси z |
| Fwxa,t, Mwxa,t | Сила приостановки и момент применилась к колесу на оси a, отследите t вдоль зафиксированной колесом оси X |
| Fwya,t, Mwya,t | Сила приостановки и момент применилась к колесу на оси a, отследите t вдоль зафиксированной колесом оси Y |
| Fvza,t, Mvza,t | Сила приостановки и момент применилась к транспортному средству на оси a, отследите t вдоль зафиксированной колесом оси z |
| Fvxa,t, Mvxa,t | Сила приостановки и момент применилась к транспортному средству на оси a, отследите t вдоль зафиксированной колесом оси X |
| Fvya,t, Mvya,t | Сила приостановки и момент применилась к транспортному средству на оси a, отследите t вдоль зафиксированной колесом оси Y |
| Fz0a | Вертикальное усилие предварительной нагрузки пружины подвески применилось к колесам на оси a |
| kza | Вертикальный коэффициент упругости применился к дорожкам на оси a |
| mhsteera | Регулирование угла к вертикальному наклону силы, примененному в поставщике услуг колеса для дорожек на оси a |
| δsteera,t | Регулирование углового входа для оси a, отследите t |
| cza | Вертикальное постоянное затухание применилось к дорожкам на оси a |
| Rewa,t | Эффективный радиус колеса для оси a, отследите t |
| Fzhstopa,t | Вертикальные hardstop обеспечивают в оси a, отследите t, вдоль зафиксированной транспортным средством оси z |
| Fzaswya,t | Вертикальная сила антивлияния в оси a, отследите t, вдоль зафиксированной транспортным средством оси z |
| zva,t, żva,t | Смещение транспортного средства и скорость в оси a, отследите t, вдоль зафиксированной транспортным средством оси z |
| zwa,t, żwa,t | Отследите смещение и скорость в оси a, отследите t, вдоль зафиксированной транспортным средством оси z |
| xva,t, ẋva,t | Смещение транспортного средства и скорость в оси a, отследите t, вдоль зафиксированной транспортным средством оси z |
| xwa,t, ẋwa,t | Отследите смещение и скорость в оси a, отследите t, вдоль зафиксированной транспортным средством оси z |
| yva,t, ẏva,t | Смещение транспортного средства и скорость в оси a, отследите t, вдоль зафиксированной транспортным средством оси Y |
| ywa,t, ẏwa,t | Отследите смещение и скорость в оси a, отследите t, вдоль зафиксированной транспортным средством оси Y |
| Ha,t | Высота приостановки в оси a, отследите t |
| Rewa,t | Эффективный радиус колеса в оси a, отследите t |
Силы Hardstop
hardstop сила обратной связи, Fzhstopa,t, что блок применяется, зависят от того, сжимает ли приостановка или расширяет. Блок прикладывает силу:
В сжатии, когда приостановка сжата больше, чем максимальное расстояние, заданное параметром Suspension maximum height, Hmax.
В расширении, когда расширение приостановки больше максимального расширения, заданного параметром Suspension maximum height, Hmax.
Чтобы вычислить силу, блок использует жесткость на основе гиперболической касательной и экспоненциального масштабирования.
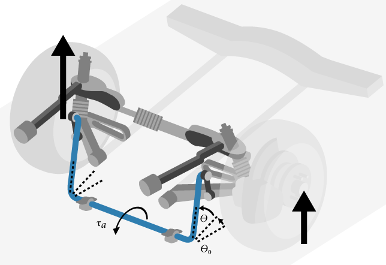
Антипоколеблите панель
Опционально, блок реализует силу панели антивлияния, Fzaswya,t, для осей, которые имеют две дорожки. Этот рисунок показывает, как панель антивлияния передает крутящий момент между двумя дорожками независимой подвески на разделяемой оси. Каждая независимая подвеска применяет крутящий момент к панели антивлияния через руку радиуса, которая расширяет от панели антивлияния назад к точке контакта независимой подвески.
Чтобы вычислить силу панели влияния, блок реализует эти уравнения.
| Вычисление | Уравнение |
|---|
|
Антипоколеблите панель угловое отклонение для данной оси и дорожки, Δϴa,t
|
|
|
Антипоколеблите угол скручивания панели, ϴa
|
|
|
Антипоколеблите крутящий момент панели, τa
|
|
|
Антиколеблитесь силы панели обратились к колесу на оси a, отследите t вдоль зафиксированной колесом оси z
|
|
Уравнения и фигура используют эти переменные.
| τa |
Антипоколеблите крутящий момент панели
|
| θ |
Антипоколеблите угол скручивания панели
|
| θ0a |
Начальная панель антивлияния скручивает угол
|
| Δϴa,t | Антипоколеблите панель угловое отклонение в оси a, отследите t |
| r | Антипоколеблите радиус руки панели |
| z0 | Вертикальное расстояние от точки контакта панели антивлияния, чтобы антипоколебать среднюю линию панели |
| Fzswaya,t |
Антиколеблитесь сила панели применилась к колесу на оси a, отследите t вдоль зафиксированной колесом оси z
|
| zva,t |
Смещение транспортного средства в оси a, отследите t, вдоль зафиксированной транспортным средством оси z
|
| zwa,t |
Смещение колеса в оси a, отследите t, вдоль зафиксированной транспортным средством оси z
|
Изгиб, литейщик и углы пальца ноги
Чтобы вычислить изгиб, литейщика и углы пальца ноги, блок использует линейные функции высоты приостановки и держащегося угла.
Уравнения используют эти переменные.
| ξa,t |
Угол изгиба колеса на оси a, отследите t
|
| ηa,t |
Угол литейщика колеса на оси a, отследите t
|
| ζa,t |
Угол пальца ноги колеса на оси a, отследите t
|
| ξ0a, η0a, ζ0a |
Номинальная ось приостановки изгиб, литейщик и углы пальца ноги, соответственно, под нулевым руководящим углом
|
| mhcambera, mhcastera, mhtoea |
Изгиб, литейщик и углы пальца ноги, соответственно, по сравнению с высотой приостановки клонятся для оси a
|
| mcambersteera, mcastersteera, mtoesteera |
Изгиб, литейщик и углы пальца ноги, соответственно, по сравнению с держащимся углом клонятся для оси a
|
| mhsteera |
Регулирование угла по сравнению с вертикальной силой клонится для оси a
|
| δsteera,t |
Регулирование углового входа для оси a, отследите t
|
| zva,t |
Смещение транспортного средства в оси a, отследите t, вдоль зафиксированной транспортным средством оси z
|
| zwa,t |
Отследите смещение в оси a, отследите t, вдоль зафиксированной транспортным средством оси z
|
Регулирование углов
Опционально, можно ввести держащиеся углы для дорожек. Чтобы вычислить держащиеся углы для колес, блок возмещает входные руководящие углы с линейной функцией высоты приостановки.
Уравнение использует эти переменные.
| mtoesteera |
Ось a угол пальца ноги по сравнению с держащимся угловым наклоном
|
| mhsteera |
Ось a регулирование угла по сравнению с вертикальным наклоном силы
|
| mhtoea |
Ось a угол пальца ноги по сравнению с наклоном высоты приостановки
|
| δwhlsteera,t |
Руководящий угол колеса для оси a, отследите t
|
| δsteera,t |
Регулирование углового входа для оси a, отследите t
|
| zva,t |
Смещение транспортного средства в оси a, отследите t, вдоль зафиксированной транспортным средством оси z
|
| zwa,t |
Отследите смещение в оси a, отследите t, вдоль зафиксированной транспортным средством оси z
|
Степень и энергия
Блок вычисляет эти характеристики приостановки для каждой оси, a, дорожка, t.
| Вычисление | Уравнение |
|---|
Рассеянная степень, Psuspa,t |
|
Поглощенная энергия, Esuspa,t |
|
Высота приостановки, Ha,t |
|
Расстояние от поставщика услуг колеса сосредотачивается к интерфейсу шины/дороги |
|
Уравнения используют эти переменные.
| mhsteera | Регулирование угла к вертикальному наклону силы, примененному в поставщике услуг колеса для дорожек на оси a |
| δsteera,t | Регулирование углового входа для оси a, отследите t |
| Rewa,t | Ось a, отследите t эффективный радиус колеса от поставщика услуг колеса сосредотачивается к интерфейсу шины/дороги |
| Fz0a | Вертикальное усилие предварительной нагрузки пружины подвески применилось к колесам на оси a |
| zwtra,t | Расстояние от поставщика услуг колеса сосредотачивается к интерфейсу шины/дороги вдоль зафиксированной транспортным средством оси z |
| zva,t, żva,t | Смещение транспортного средства и скорость в оси a, отследите t, вдоль зафиксированной транспортным средством оси z |
| zwa,t, żwa,t | Отследите смещение и скорость в оси a, отследите t, вдоль зафиксированной транспортным средством оси z |
Порты
Входной параметр
развернуть все
WhlPz — Отследите z- смещение оси
array
Отследите смещение, zw, вдоль зафиксированной колесом оси z, в m. Измерениями массива является 1 общим количеством дорожек на транспортном средстве.
Например, для транспортного средства 2D оси с двумя дорожками на ось, WhlPz:
WhlRe — Колесо эффективный радиус
array
Эффективный радиус колеса, Rew, в m. Измерениями массива является 1 общим количеством дорожек на транспортном средстве.
Например, для транспортного средства 2D оси с двумя дорожками на ось, WhlRe:
WhlVz — Отследите z- скорость оси
array
Отследите скорость, żw, вдоль зафиксированной колесом оси z, в m. Измерениями массива является 1 общим количеством дорожек на транспортном средстве.
Например, для транспортного средства 2D оси с двумя дорожками на ось, WhlVz:
WhlFx — Продольная сила колеса на транспортном средстве
array
Продольная сила колеса применилась к транспортному средству, Fwx, вдоль зафиксированной транспортным средством оси X. Измерениями массива является 1 общим количеством дорожек на транспортном средстве.
Например, для транспортного средства 2D оси с двумя дорожками на ось, WhlFx:
WhlFy — Боковая сила колеса на транспортном средстве
array
Боковая сила колеса применилась к транспортному средству, Fwy, вдоль зафиксированной транспортным средством оси Y. Измерениями массива является 1 общим количеством дорожек на транспортном средстве.
Например, для транспортного средства 2D оси с двумя дорожками на ось, WhlFy:
WhlM — Момент приостановки на колесе
array
Продольные, боковые, и вертикальные моменты приостановки в оси a, отследите t, примененный колесо в координате ссылки поставщика услуг колеса оси, в N · m. Измерениями массива является 3 общим количеством дорожек на транспортном средстве.
WhlM(1,...) — Момент приостановки применился к колесу о зафиксированной транспортным средством (продольной) оси X
WhlM(2,...) — Момент приостановки применился к колесу о зафиксированной транспортным средством оси Y (ответвление)
WhlM(3,...) — Момент приостановки применился к колесу о зафиксированной транспортным средством (вертикальной) оси z
Например, для транспортного средства 2D оси с двумя дорожками на ось, WhlM:
Размерностями сигнала является [3x4].
Сигнал содержит моменты приостановки, применился к четырем колесам согласно их оси и местоположениям дорожки.
| Элемент массива | Ось | Дорожка | Ось момента |
|---|
WhlM(1,1) | 1 | 1 | Зафиксированная транспортным средством (продольная) ось X |
WhlM(1,2) | 1 | 2 |
WhlM(1,3) | 2 | 1 |
WhlM(1,4) | 2 | 2 |
WhlM(2,1) | 1 | 1 | Зафиксированная транспортным средством ось Y (ответвление) |
WhlM(2,2) | 1 | 2 |
WhlM(2,3) | 2 | 1 |
WhlM(2,4) | 2 | 2 |
WhlM(3,1) | 1 | 1 | Зафиксированная транспортным средством (вертикальная) ось z |
WhlM(3,2) | 1 | 2 |
WhlM(3,3) | 2 | 1 |
WhlM(3,4) | 2 | 2 |
VehP — Смещение транспортного средства
array
Смещение транспортного средства от оси a, отследите t вдоль зафиксированной транспортным средством системы координат, в m. Измерениями массива является 3 общим количеством дорожек на транспортном средстве.
VehP(1,...) — Смещение транспортного средства от дорожки, xv, вдоль зафиксированной транспортным средством оси X
VehP(2,...) — Смещение транспортного средства от дорожки, yv, вдоль зафиксированной транспортным средством оси Y
VehP(3,...) — Смещение транспортного средства от дорожки, zv, вдоль зафиксированной транспортным средством оси z
Например, для транспортного средства 2D оси с двумя дорожками на ось, VehP:
VehV — Скорость транспортного средства
array
Скорость транспортного средства в оси a, отследите t вдоль зафиксированной транспортным средством системы координат, в m. Размерностями входного массива является 3 aT.
VehV(1,...) — Скорость транспортного средства в дорожке, xv, вдоль зафиксированной транспортным средством оси X
VehV(2,...) — Скорость транспортного средства в дорожке, yv, вдоль зафиксированной транспортным средством оси Y
VehV(3,...) — Скорость транспортного средства в дорожке, zv, вдоль зафиксированной транспортным средством оси z
Например, для транспортного средства 2D оси с двумя дорожками на ось, VehV:
StrgAng — Регулирование угла, дополнительного
array
Дополнительный руководящий угол для каждого колеса, δ. Размерностями входного массива является 1 количеством управляемых дорожек.
Например, для транспортного средства 2D оси с двумя дорожками на ось, можно ввести держащиеся углы для обоих колес на первой оси.
Создать StrgAng порт, набор Steered axle enable by axle, StrgEnByAxl к [1 0]. Измерениями массива входного сигнала является [1x2].
StrgAng сигнал содержит два держащихся угла согласно их оси и местоположениям дорожки.
| Элемент массива | Ось | Дорожка |
|---|
StrgAng(1,1) | 1 | 1 |
StrgAng(1,2) | 1 | 2 |
Зависимости
Установка элемента вектора Steered axle enable by axle, StrgEnByAxl к 1 создает:
Input port StrgAng.
Параметры:
Toe angle vs steering angle slope, ToeStrgSlp
Caster angle vs steering angle slope, CasterStrgSlp
Camber angle vs steering angle slope, CamberStrgSlp
Suspension height vs steering angle slope, StrgHgtSlp
Вывод
развернуть все
Info — Сигнал шины
шина
Соедините шиной сигнал, содержащий значения блока. Сигналы являются массивами, которые зависят от местоположения дорожки.
Например, здесь индексы для 2D оси, 2D отслеживают транспортное средство. Общее количество дорожек равняется четырем.
| Сигнал | Описание | Сигнал массивов | Переменная | Модули |
|---|
Camber | Углы колеса согласно оси и местоположению дорожки. | 1D |
| рад |
Caster |
|
Toe |
|
Height | Высота приостановки | 1D | H | m |
Power | Рассеивание энергии приостановки | 1D | Psusp | W |
Energy | Приостановка поглотила энергию | 1D | Esusp | J |
VehF | Силы приостановки обратились к транспортному средству | 3D | Для 2D оси, двух дорожек на транспортное средство оси:
| N |
VehM | Моменты приостановки применились к транспортному средству | 3D | Для 2D оси, двух дорожек на транспортное средство оси:
| N· |
WhlF | Сила приостановки применилась к колесу | 3D | Для 2D оси, двух дорожек на транспортное средство оси:
| N |
WhlP | Отследите смещение | 3D | Для 2D оси, двух дорожек на транспортное средство оси:
| m |
WhlV | Отследите скорость | 3D | Для 2D оси, двух дорожек на транспортное средство оси:
| m/s |
WhlAng | Изгиб колеса, литейщик, углы пальца ноги | 3D | Для 2D оси, двух дорожек на транспортное средство оси:
| рад |
VehF — Сила приостановки на транспортном средстве
array
Продольная, боковая, и вертикальная сила приостановки в оси a, отследите t, примененный транспортное средство в точке контакта приостановки, в N. Измерениями массива является 3 общим количеством дорожек на транспортном средстве.
VehF(1,...) — Сила приостановки применилась к транспортному средству вдоль зафиксированной транспортным средством (продольной) оси X
VehF(2,...) — Сила приостановки применилась к транспортному средству вдоль зафиксированной транспортным средством оси Y (ответвление)
VehF(3,...) — Сила приостановки применилась к транспортному средству вдоль зафиксированной транспортным средством (вертикальной) оси z
Например, для транспортного средства 2D оси с двумя дорожками на ось, VehF:
Размерностями сигнала является [3x4].
Сигнал содержит силы приостановки, применился к транспортному средству согласно местоположениям дорожки и оси.
| Элемент массива | Ось | Дорожка | Обеспечьте ось |
|---|
VehF(1,1) | 1 | 1 | Зафиксированная транспортным средством (продольная) ось X |
VehF(1,2) | 1 | 2 |
VehF(1,3) | 2 | 1 |
VehF(1,4) | 2 | 2 |
VehF(2,1) | 1 | 1 | Зафиксированная транспортным средством ось Y (ответвление) |
VehF(2,2) | 1 | 2 |
VehF(2,3) | 2 | 1 |
VehF(2,4) | 2 | 2 |
VehF(3,1) | 1 | 1 | Зафиксированная транспортным средством (вертикальная) ось z |
VehF(3,2) | 1 | 2 |
VehF(3,3) | 2 | 1 |
VehF(3,4) | 2 | 2 |
VehM — Момент приостановки на транспортном средстве
array
Продольный, боковой, и вертикальный момент приостановки в оси a, отследите t, примененный транспортное средство в точке контакта приостановки, в N · m. Измерениями массива является 3 общим количеством дорожек на транспортном средстве.
VehM(1,...) — Момент приостановки применился к транспортному средству о зафиксированной транспортным средством (продольной) оси X
VehM(2,...) — Момент приостановки применился к транспортному средству о зафиксированной транспортным средством оси Y (ответвление)
VehM(3,...) — Момент приостановки применился к транспортному средству о зафиксированной транспортным средством (вертикальной) оси z
Например, для транспортного средства 2D оси с двумя дорожками на ось, VehM:
Размерностями сигнала является [3x4].
Сигнал содержит моменты приостановки, применился к транспортному средству согласно местоположениям дорожки и оси.
| Элемент массива | Ось | Дорожка | Ось момента |
|---|
VehM(1,1) | 1 | 1 | Зафиксированная транспортным средством (продольная) ось X |
VehM(1,2) | 1 | 2 |
VehM(1,3) | 2 | 1 |
VehM(1,4) | 2 | 2 |
VehM(2,1) | 1 | 1 | Зафиксированная транспортным средством ось Y (ответвление) |
VehM(2,2) | 1 | 2 |
VehM(2,3) | 2 | 1 |
VehM(2,4) | 2 | 2 |
VehM(3,1) | 1 | 1 | Зафиксированная транспортным средством (вертикальная) ось z |
VehM(3,2) | 1 | 2 |
VehM(3,3) | 2 | 1 |
VehM(3,4) | 2 | 2 |
WhlF — Сила приостановки на колесе
array
Продольная, боковая, и вертикальная приостановка обеспечивает в оси a, отследите t, примененный колесо в координате ссылки поставщика услуг колеса оси, в N. Измерениями массива является 3 общим количеством дорожек на транспортном средстве.
WhlF(1,...) — Сила приостановки на колесе вдоль зафиксированной транспортным средством (продольной) оси X
WhlF(2,...) — Сила приостановки на колесе вдоль зафиксированной транспортным средством оси Y (ответвление)
WhlF(3,...) — Сила приостановки на колесе вдоль зафиксированной транспортным средством (вертикальной) оси z
Например, для транспортного средства 2D оси с двумя дорожками на ось, WhlF:
Размерностями сигнала является [3x4].
Сигнал содержит силы колеса, применился к транспортному средству согласно местоположениям дорожки и оси.
| Элемент массива | Ось | Дорожка | Обеспечьте ось |
|---|
WhlF(1,1) | 1 | 1 | Зафиксированная транспортным средством (продольная) ось X |
WhlF(1,2) | 1 | 2 |
WhlF(1,3) | 2 | 1 |
WhlF(1,4) | 2 | 2 |
WhlF(2,1) | 1 | 1 | Зафиксированная транспортным средством ось Y (ответвление) |
WhlF(2,2) | 1 | 2 |
WhlF(2,3) | 2 | 1 |
WhlF(2,4) | 2 | 2 |
WhlF(3,1) | 1 | 1 | Зафиксированная транспортным средством (вертикальная) ось z |
WhlF(3,2) | 1 | 2 |
WhlF(3,3) | 2 | 1 |
WhlF(3,4) | 2 | 2 |
WhlV — Отследите скорость
array
Продольная, боковая, и вертикальная скорость дорожки в оси a, отследите t, в m/s. Измерениями массива является 3 общим количеством дорожек на транспортном средстве.
WhlV(1,...) — Отследите скорость вдоль зафиксированной транспортным средством (продольной) оси X
WhlV(2,...) — Отследите скорость вдоль зафиксированной транспортным средством оси Y (ответвление)
WhlV(3,...) — Отследите скорость вдоль зафиксированной транспортным средством (вертикальной) оси z
Например, для транспортного средства 2D оси с двумя дорожками на ось, WhlV:
Размерностями сигнала является [3x4].
Сигнал содержит силы колеса, применился к транспортному средству согласно местоположениям дорожки и оси.
| Элемент массива | Ось | Дорожка | Обеспечьте ось |
|---|
WhlV(1,1) | 1 | 1 | Зафиксированная транспортным средством (продольная) ось X |
WhlV(1,2) | 1 | 2 |
WhlV(1,3) | 2 | 1 |
WhlV(1,4) | 2 | 2 |
WhlV(2,1) | 1 | 1 | Зафиксированная транспортным средством ось Y (ответвление) |
WhlV(2,2) | 1 | 2 |
WhlV(2,3) | 2 | 1 |
WhlV(2,4) | 2 | 2 |
WhlV(3,1) | 1 | 1 | Зафиксированная транспортным средством (вертикальная) ось z |
WhlV(3,2) | 1 | 2 |
WhlV(3,3) | 2 | 1 |
WhlV(3,4) | 2 | 2 |
WhlAng — Изгиб колеса, литейщик, углы пальца ноги
array
Изгиб, литейщик и углы пальца ноги в оси a, отследите t, в рад. Измерениями массива является 3 общим количеством дорожек на транспортном средстве.
WhlAng(1,...) — Угол изгиба
WhlAng(2,...) — Угол литейщика
WhlAng(3,...) — Угол пальца ноги
Например, для транспортного средства 2D оси с двумя дорожками на ось, WhlAng:
Параметры
развернуть все
Enable active damping — Включайте затухание
off (значение по умолчанию) | off
Включайте затухание
Зависимости
Выбор этого параметра создает:
Damping coefficient map, f_act_susp_cz
Damping actuator duty cycle breakpoints, f_act_susp_duty_bpt
Damping actuator velocity breakpoints, f_act_susp_zdot_bpt
Number of axles, NumAxl — Количество осей
2 scalar
Количество осей, Na, безразмерного.
Number of tracks by axle, NumTracksByAxl — Количество дорожек на ось
[2 2] vector
Количество дорожек на ось, Nta, безразмерный. Вектором является 1 количеством осей транспортного средства, Na. Например, [1,2] представляет одну дорожку на оси 1 и две дорожки на оси 2.
Steered axle enable by axle, StrgEnByAxl — Булев вектор, чтобы включить регулирование оси
[1 0] vector
Булев вектор, который включает регулирование оси, Ensteer, безразмерный. Вектором является 1 количеством осей транспортного средства, Na. Например:
[1 0]
[1 1]
Зависимости
Установка любого элемента вектора Steered axle enable by axle, StrgEnByAxl к 1 создает:
Input port StrgAng.
Параметры:
Toe angle vs steering angle slope, ToeStrgSlp
Caster angle vs steering angle slope, CasterStrgSlp
Camber angle vs steering angle slope, CamberStrgSlp
Suspension height vs steering angle slope, StrgHgtSlp
Например, для транспортного средства 2D оси с двумя дорожками на ось, можно ввести держащиеся углы для обоих колес на первой оси.
Создать StrgAng порт, набор Steered axle enable by axle, StrgEnByAxl к [1 0]. Измерениями массива входного сигнала является [1x2].
StrgAng сигнал содержит два держащихся угла согласно их оси и местоположениям дорожки.
| Элемент массива | Ось | Дорожка |
|---|
StrgAng(1,1) | 1 | 1 |
StrgAng(1,2) | 1 | 2 |
Anti-sway axle enable by axle, AntiSwayEnByAxl — Булев вектор, чтобы включить антивлияние оси
[0 0] vector
Булев вектор, который включает антивлияние оси для оси a, безразмерный. Например, [1 0] включает оси 1 антивлияние и отключает ось 2 антивлияния. Вектором является 1 количеством осей транспортного средства, Na.
Зависимости
Установка элемента вектора Anti-sway axle enable by axle, AntiSwayEnByAxl к 1 создает эти параметры антивлияния:
Anti-sway arm radius, AntiSwayR
Anti-sway arm neutral angle, AntiSwayNtrlAng
Anti-sway torsion spring constant, AntiSwayTrsK
Приостановка
Податливость и ослабляющий - пассивный элемент
Suspension spring constant, Kz — Постоянная пружина подвески
64370
scalar | vector
Линейный вертикальный коэффициент упругости для независимой подвески отслеживает на оси a, kza, в N/m.
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Suspension spring preload, F0z — Предварительная нагрузка пружины подвески
9810 scalar | vector
Вертикальная упругая сила предварительной нагрузки применилась к колесам на оси в координатах ссылки поставщика услуг колеса, Fz0a, в N. Положительные усилия предварительной нагрузки:
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Suspension shock damping constant, Cz — Шок приостановки, ослабляющий постоянный
10000 scalar | vector
Линейное вертикальное затухание, постоянное для независимой подвески, отслеживает на оси a, cza, в нс/м.
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Зависимости
Чтобы создать этот параметр, очистите Enable active damping.
Suspension maximum height, Hmax высота
0.5 scalar | vector
Максимальное расширение приостановки или минимальная высота сжатия приостановки, Hmax, для оси a прежде чем приостановка достигает hardstop в m.
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Податливость и ослабляющий - активный
Damping coefficient map, f_act_susp_cz — Интерполяционная таблица
[10000 10000;10000 10000] M- N массив
Таблица коэффициента демпфирования как функция цикла действительной военной службы и скорости сжатия привода, в N · s/m. Каждое значение задает затухание для определенной комбинации рабочего цикла привода и скорости. Измерения массива должны совпадать с рабочим циклом, M, и скорость привода, N, установите точки останова векторные размерности.
Зависимости
Чтобы создать этот параметр, очистите Enable active damping.
Damping actuator duty cycle breakpoints, f_act_susp_duty_bpt — Точки останова рабочего цикла
[0 1] 1- M вектор
Затухание точек останова рабочего цикла привода, безразмерных.
Зависимости
Чтобы создать этот параметр, очистите Enable active damping.
Damping actuator velocity breakpoints, f_act_susp_zdot_bpt — Точки останова скорости
[-1 1] 1- N вектор
Затухание точек останова привода скорости, в m/s.
Зависимости
Чтобы создать этот параметр, очистите Enable active damping.
Геометрия
Toe angle at steering center, Toe — Угол пальца ноги
0.0349 scalar
Номинальный угол пальца ноги приостановки под нулевым руководящим углом, ζ0a, в рад.
Roll steer vs suspension height slope, RollStrgSlp — Регулируйте угловой наклон приостановки
-0.2269 scalar | vector
Список регулирует угол по сравнению с высотой приостановки, mhtoea, в rad/m.
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Toe angle vs steering angle slope, ToeStrgSlp — Угловой руководящий наклон пальца ноги
0.01 scalar | vector
Угол пальца ноги по сравнению с держащимся угловым наклоном, mtoesteera, безразмерным.
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Зависимости
Установка элемента вектора Steered axle enable by axle, StrgEnByAxl к 1 создает:
Input port StrgAng.
Параметры:
Toe angle vs steering angle slope, ToeStrgSlp
Caster angle vs steering angle slope, CasterStrgSlp
Camber angle vs steering angle slope, CamberStrgSlp
Suspension height vs steering angle slope, StrgHgtSlp
Caster angle at steering center, Caster — Угол литейщика в держащемся центре
0.0698 scalar
Номинальный угол литейщика приостановки под нулевым руководящим углом, η0a, в рад.
Caster angle vs suspension height slope, CasterHslp — Угол литейщика по сравнению с наклоном высоты приостановки
-0.2269 scalar | vector
Угол литейщика по сравнению с высотой приостановки, mhcastera, в rad/m.
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Caster angle vs steering angle slope, CasterStrgSlp — Угол литейщика по сравнению с держащимся угловым наклоном
0.01 scalar | vector
Угол литейщика по сравнению с держащимся угловым наклоном, mcastersteera, безразмерным.
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Зависимости
Установка элемента вектора Steered axle enable by axle, StrgEnByAxl к 1 создает:
Input port StrgAng.
Параметры:
Toe angle vs steering angle slope, ToeStrgSlp
Caster angle vs steering angle slope, CasterStrgSlp
Camber angle vs steering angle slope, CamberStrgSlp
Suspension height vs steering angle slope, StrgHgtSlp
Camber angle at steering center, Camber — Угол изгиба в держащемся центре
0.0698 scalar
Номинальный угол изгиба приостановки под нулевым руководящим углом, ξ0a, в рад.
Camber angle vs suspension height slope, CamberHslp — Угол изгиба по сравнению с наклоном высоты приостановки
-0.2269 scalar | vector
Угол изгиба по сравнению с высотой приостановки, mhcambera, в rad/m.
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Camber angle vs steering angle slope, CamberStrgSlp — Угол изгиба по сравнению с держащимся угловым наклоном
0.01 scalar | vector
Угол изгиба по сравнению с держащимся угловым наклоном, mcambersteera, безразмерным.
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Зависимости
Установка элемента вектора Steered axle enable by axle, StrgEnByAxl к 1 создает:
Input port StrgAng.
Параметры:
Toe angle vs steering angle slope, ToeStrgSlp
Caster angle vs steering angle slope, CasterStrgSlp
Camber angle vs steering angle slope, CamberStrgSlp
Suspension height vs steering angle slope, StrgHgtSlp
Suspension height vs steering angle slope, StrgHgtSlp — Высота приостановки по сравнению с держащимся угловым наклоном
0.1432 scalar | vector
Регулируя угол к вертикальному наклону силы, примененному в контрольной точке поставщика услуг колеса приостановки, mhsteera, в m/rad.
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Зависимости
Установка элемента вектора Steered axle enable by axle, StrgEnByAxl к 1 создает:
Input port StrgAng.
Параметры:
Toe angle vs steering angle slope, ToeStrgSlp
Caster angle vs steering angle slope, CasterStrgSlp
Camber angle vs steering angle slope, CamberStrgSlp
Suspension height vs steering angle slope, StrgHgtSlp
Антивлияние
Anti-sway arm radius, AntiSwayR — Антипоколеблите радиус руки
0.2
scalar | vector
Антипоколеблите радиус руки, r, в m.
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Зависимости
Установка элемента вектора Anti-sway axle enable by axle, AntiSwayEnByAxl к 1 создает эти параметры антивлияния:
Anti-sway arm radius, AntiSwayR
Anti-sway arm neutral angle, AntiSwayNtrlAng
Anti-sway torsion spring constant, AntiSwayTrsK
Anti-sway arm neutral angle, AntiSwayNtrlAng — Антипоколеблите руку нейтральный угол
0.5236 scalar | vector
Антипоколеблите руку нейтральный угол, θ0a, на номинальной высоте приостановки, в рад.
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Зависимости
Установка элемента вектора Anti-sway axle enable by axle, AntiSwayEnByAxl к 1 создает эти параметры антивлияния:
Anti-sway arm radius, AntiSwayR
Anti-sway arm neutral angle, AntiSwayNtrlAng
Anti-sway torsion spring constant, AntiSwayTrsK
Anti-sway torsion spring constant, AntiSwayTrsK — Антипоколеблите постоянную торсионную пружину
5.7296e+03 (значение по умолчанию) | scalar | vector
Антипоколеблите постоянную торсионную пружину панели, ka, в N · m/rad.
Вектором является 1 количеством осей транспортного средства, Na. Если вы вводите скалярное значение, блок использует то значение во всех осях.
Зависимости
Установка элемента вектора Anti-sway axle enable by axle, AntiSwayEnByAxl к 1 создает эти параметры антивлияния:
Anti-sway arm radius, AntiSwayR
Anti-sway arm neutral angle, AntiSwayNtrlAng
Anti-sway torsion spring constant, AntiSwayTrsK
Ссылки
[1] Гиллеспи, Томас. Основные принципы динамики аппарата. Варрендэйл, PA: ассоциация инженеров автомобилестроения, 1992.
[2] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. SAE J670. Варрендэйл, PA: ассоциация инженеров автомобилестроения, 2008.
[3] Технический Комитет. Дорожные транспортные средства — Динамика аппарата и способность устойчивости движения — Словарь. ISO 8855:2011. Женева, Швейцария: Международная организация по стандартизации, 2011.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Введенный в R2018a