Определите, содержит ли изображение epipole
isIn — Допустимый epipoleДопустимый epipole логический в виде true когда изображение содержит epipole и false когда изображение не содержит epipole.
Когда плоскости изображения будут под достаточно большим углом друг другу, можно ожидать, что epipole будет расположен в изображении.
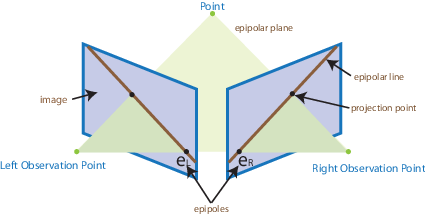
Когда плоскости изображения будут под более тонким углом друг другу, можно ожидать, что epipole будет расположен за пределами изображения, (но все еще в плоскости изображения).

epipole — Местоположение epipoleМестоположение epipole, возвращенного как вектор 1 на 2.
epipolarLine | estimateFundamentalMatrix | estimateUncalibratedRectification
