Реализуйте одноколейный путь 3DOF твердый кузов, чтобы вычислить продольный, боковой, и движение отклонения от курса
Блок Bicycle Model реализует твердую модель кузова одноколейного пути 2D оси, чтобы вычислить продольный, боковой, и движение отклонения от курса. Блок составляет массу тела, аэродинамическое перетаскивание и распределение веса между осями из-за ускорения и регулирования. Существует два типа блоков Bicycle Model.
| Блок | Реализация |
|---|---|
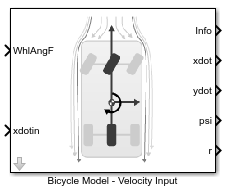
Bicycle Model - Velocity Input |
|
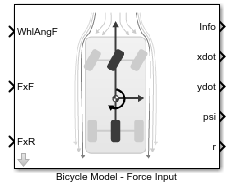
Bicycle Model - Force Input |
|
Чтобы вычислить нормальные силы на передние и задние оси, блок использует движение транспортного средства твердого тела, силы системы подвески, и ветер и силу сопротивления. Блок разрешает силу и компоненты момента на твердой системе координат кузова.
WhlAngF — Угол колесаscalarПередний угол колеса, в рад.
FxF — Вход силы: Общая продольная сила на передней осиscalarПродольная сила на передней оси, FxF, вдоль зафиксированного транспортным средством x- ось, в N.
Входной порт блока Bicycle Model - Force Input.
FxR — Вход силы: Общая продольная сила на задней осиscalarПродольная сила на задней оси, FxR, вдоль зафиксированного транспортным средством x- ось, в N.
Входной порт блока Bicycle Model - Force Input.
xdotin — Скоростной Вход: Продольная скоростьscalarСкорость CG транспортного средства вдоль зафиксированной транспортным средством оси X, в m/s.
Входной порт блока Bicycle Model - Velocity Input.
Info — Сигнал шиныСигнал шины, содержащий эти значения блока.
| Сигнал | Описание | Значение | Модули | |||||
|---|---|---|---|---|---|---|---|---|
InertFrm | Cg | Disp | X | Смещение CG транспортного средства вдоль зафиксированной землей Оси X | Вычисленный | m | ||
Y | Смещение CG транспортного средства вдоль зафиксированной землей Оси Y | Вычисленный | m | |||||
Z | Смещение CG транспортного средства вдоль зафиксированной землей оси Z | 0 | m | |||||
Vel | Xdot | Скорость CG транспортного средства вдоль зафиксированной землей Оси X | Вычисленный | m/s | ||||
Ydot | Скорость CG транспортного средства вдоль зафиксированной землей Оси Y | Вычисленный | m/s | |||||
Zdot | Скорость CG транспортного средства вдоль зафиксированной землей оси Z | 0 | m/s | |||||
Ang | phi | Вращение зафиксированной транспортным средством системы координат о зафиксированной землей Оси X (список) | 0 | рад | ||||
theta | Вращение зафиксированной транспортным средством системы координат о зафиксированной землей Оси Y (подача) | 0 | рад | |||||
psi | Вращение зафиксированной транспортным средством системы координат о зафиксированной землей оси Z (отклонение от курса) | Вычисленный | рад | |||||
FrntAxl | Disp | X | Переднее смещение колеса вдоль зафиксированной землей Оси X | Вычисленный | m | |||
Y | Переднее смещение колеса вдоль зафиксированной землей Оси Y | Вычисленный | m | |||||
Z | Переднее смещение колеса вдоль зафиксированной землей оси Z | 0 | m | |||||
Vel | Xdot | Передняя скорость колеса вдоль зафиксированной землей Оси X | Вычисленный | m/s | ||||
Ydot | Передняя скорость колеса вдоль зафиксированной землей Оси Y | Вычисленный | m/s | |||||
Zdot | Передняя скорость колеса вдоль зафиксированной землей оси Z | 0 | m/s | |||||
RearAxl | Disp | X | Заднее смещение колеса вдоль зафиксированной землей Оси X | Вычисленный | m | |||
Y | Заднее смещение колеса вдоль зафиксированной землей Оси Y | Вычисленный | m | |||||
Z | Заднее смещение колеса вдоль зафиксированной землей оси Z | 0 | m | |||||
Vel | Xdot | Задняя скорость колеса вдоль зафиксированной землей Оси X | Вычисленный | m/s | ||||
Ydot | Задняя скорость колеса вдоль зафиксированной землей Оси Y | Вычисленный | m/s | |||||
Zdot | Задняя скорость колеса вдоль зафиксированной землей оси Z | 0 | m/s | |||||
Hitch | Disp | X | Помеха возмещена от плоскости оси вдоль зафиксированной землей Оси X | Вычисленный | m | |||
Y | Помеха возмещена от центральной плоскости вдоль зафиксированной землей Оси Y | Вычисленный | m | |||||
Z | Помеха возмещена от плоскости оси вдоль зафиксированной землей оси Z | Вычисленный | m | |||||
Vel | Xdot | Цепляйте скорость смещения от плоскости оси вдоль зафиксированной землей Оси X | Вычисленный | m | ||||
Ydot | Цепляйте скорость смещения от центральной плоскости вдоль зафиксированной землей Оси Y | Вычисленный | m | |||||
Zdot | Цепляйте скорость смещения от плоскости оси вдоль зафиксированной землей оси Z | Вычисленный | m | |||||
Geom | Disp | X | Шасси транспортного средства возмещено от плоскости оси вдоль зафиксированной землей Оси X | Вычисленный | m | |||
Y | Шасси транспортного средства возмещено от центральной плоскости вдоль зафиксированной землей Оси Y | Вычисленный | m | |||||
Z | Шасси транспортного средства возмещено от плоскости оси вдоль зафиксированной землей оси Z | Вычисленный | m | |||||
Vel | Xdot | Шасси транспортного средства возмещают скорость вдоль зафиксированной землей Оси X | Вычисленный | m/s | ||||
Ydot | Шасси транспортного средства возмещают скорость вдоль зафиксированной землей Оси Y | Вычисленный | m/s | |||||
Zdot | Шасси транспортного средства возмещают скорость вдоль зафиксированной землей оси Z | Вычисленный | m/s | |||||
BdyFrm | Cg | Vel | xdot | Скорость CG транспортного средства вдоль зафиксированной транспортным средством оси X | Вычисленный | m/s | ||
ydot | Скорость CG транспортного средства вдоль зафиксированной транспортным средством оси Y | Вычисленный | m/s | |||||
zdot | Скорость CG транспортного средства вдоль зафиксированной транспортным средством оси z | 0 | m/s | |||||
Ang | Beta | Угол промаха тела, β
| Вычисленный | рад | ||||
AngVel | p | Скорость вращения транспортного средства о зафиксированной транспортным средством оси X (прокручивают уровень), | 0 | рад/с | ||||
q | Скорость вращения транспортного средства о зафиксированной транспортным средством оси Y (передают уровень), | 0 | рад/с | |||||
r | Скорость вращения транспортного средства о зафиксированной транспортным средством оси z (уровень отклонения от курса) | Вычисленный | рад/с | |||||
Acc | ax | Ускорение CG транспортного средства вдоль зафиксированной транспортным средством оси X | Вычисленный | gn | ||||
ay | Ускорение CG транспортного средства вдоль зафиксированной транспортным средством оси Y | Вычисленный | gn | |||||
az | Ускорение CG транспортного средства вдоль зафиксированной транспортным средством оси z | 0 | gn | |||||
xddot | Ускорение CG транспортного средства вдоль зафиксированной транспортным средством оси X | Вычисленный | м/с^2 | |||||
yddot | Ускорение CG транспортного средства вдоль зафиксированной транспортным средством оси Y | Вычисленный | м/с^2 | |||||
zddot | Ускорение CG транспортного средства вдоль зафиксированной транспортным средством оси z | 0 | м/с^2 | |||||
AngAcc | pdot | Транспортное средство угловое ускорение о зафиксированной транспортным средством оси X | 0 | рад/с | ||||
qdot | Транспортное средство угловое ускорение о зафиксированной транспортным средством оси Y | 0 | рад/с | |||||
rdot | Транспортное средство угловое ускорение о зафиксированной транспортным средством оси z | Вычисленный | рад/с | |||||
DCM | Матрица направляющего косинуса | Вычисленный | рад | |||||
Forces | Body | Fx | Сетевая сила на CG транспортного средства вдоль зафиксированной транспортным средством оси X | Вычисленный | N | |||
Fy | Сетевая сила на CG транспортного средства вдоль зафиксированной транспортным средством оси Y | Вычисленный | N | |||||
Fz | Сетевая сила на CG транспортного средства вдоль зафиксированной транспортным средством оси z | 0 | N | |||||
Ext | Fx | Внешняя сила на CG транспортного средства вдоль зафиксированной транспортным средством оси X | Вычисленный | N | ||||
Fy | Внешняя сила на CG транспортного средства вдоль зафиксированной транспортным средством оси Y | Вычисленный | N | |||||
Fz | Внешняя сила на CG транспортного средства вдоль зафиксированной транспортным средством оси z | 0 | N | |||||
Hitch | Fx | Цепляйтесь сила применилась к телу в местоположении помехи вдоль зафиксированной транспортным средством оси X | Входной параметр | N | ||||
Fy | Цепляйтесь сила применилась к телу в местоположении помехи вдоль зафиксированной транспортным средством оси Y | Входной параметр | N | |||||
Fz | Цепляйтесь сила применилась к телу в местоположении помехи вдоль зафиксированной транспортным средством оси z | Входной параметр | N | |||||
FrntAxl | Fx | Продольная сила на переднем колесе, вдоль зафиксированной транспортным средством оси X | Вычисленный | N | ||||
Fy | Боковая сила на переднем колесе вдоль зафиксированной транспортным средством оси Y | Вычисленный | N | |||||
Fz | Нормальная сила на переднем колесе, вдоль зафиксированной транспортным средством оси z | Вычисленный | N | |||||
RearAxl | Fx | Продольная сила на заднем колесе, вдоль зафиксированной транспортным средством оси X | Вычисленный | N | ||||
Fy | Боковая сила на заднем колесе вдоль зафиксированной транспортным средством оси Y | Вычисленный | N | |||||
Fz | Нормальная сила на заднем колесе, вдоль зафиксированной транспортным средством оси z | Вычисленный | N | |||||
Tires | FrntTire | Fx | Передняя сила шины, вдоль зафиксированной транспортным средством оси X | Вычисленный | N | |||
Fy | Передняя сила шины, вдоль зафиксированной транспортным средством оси Y | Вычисленный | N | |||||
Fz | Передняя сила шины, вдоль зафиксированной транспортным средством оси z | Вычисленный | N | |||||
RearTire | FxFx | Сила задней шины, вдоль зафиксированной транспортным средством оси X | Вычисленный | N | ||||
Fy | Сила задней шины, вдоль зафиксированной транспортным средством оси Y | Вычисленный | N | |||||
Fz | Сила задней шины, вдоль зафиксированной транспортным средством оси z | Вычисленный | N | |||||
Drag | Fx | Сила сопротивления на CG транспортного средства вдоль зафиксированной транспортным средством оси X | Вычисленный | N | ||||
Fy | Сила сопротивления на CG транспортного средства вдоль зафиксированной транспортным средством оси Y | Вычисленный | N | |||||
Fz | Сила сопротивления на CG транспортного средства вдоль зафиксированной транспортным средством оси z | Вычисленный | N | |||||
Grvty | Fx | Сила силы тяжести на CG транспортного средства вдоль зафиксированной транспортным средством оси X | Вычисленный | N | ||||
Fy | Сила силы тяжести на CG транспортного средства вдоль зафиксированной транспортным средством оси Y | Вычисленный | N | |||||
Fz | Сила силы тяжести на CG транспортного средства вдоль зафиксированной транспортным средством оси z | Вычисленный | N | |||||
Moments | Body | Mx | Момент тела на CG транспортного средства о зафиксированной транспортным средством оси X | 0 | N· | |||
My | Момент тела на CG транспортного средства о зафиксированной транспортным средством оси Y | Вычисленный | N· | |||||
Mz | Момент тела на CG транспортного средства о зафиксированной транспортным средством оси z | 0 | N· | |||||
Drag | Mx | Перетащите момент на CG транспортного средства о зафиксированной транспортным средством оси X | 0 | N· | ||||
My | Перетащите момент на CG транспортного средства о зафиксированной транспортным средством оси Y | Вычисленный | N· | |||||
Mz | Перетащите момент на CG транспортного средства о зафиксированной транспортным средством оси z | 0 | N· | |||||
Ext | Mx | Внешний момент на CG транспортного средства о зафиксированной транспортным средством оси X | 0 | N· | ||||
My | Внешний момент на CG транспортного средства о зафиксированной транспортным средством оси Y | Вычисленный | N· | |||||
Mz | Внешний момент на CG транспортного средства о зафиксированной транспортным средством оси z | 0 | N· | |||||
Hitch | Mx | Цепляйте момент в местоположении помехи о зафиксированной транспортным средством оси X | 0 | N· | ||||
My | Цепляйте момент в местоположении помехи о зафиксированной транспортным средством оси Y | Вычисленный | N· | |||||
Mz | Цепляйте момент в местоположении помехи о зафиксированной транспортным средством оси z | 0 | N· | |||||
FrntAxl | Disp | x | Переднее смещение колеса вдоль зафиксированной транспортным средством оси X | Вычисленный | m | |||
y | Переднее смещение колеса вдоль зафиксированной транспортным средством оси Y | Вычисленный | m | |||||
z | Переднее смещение колеса вдоль зафиксированной транспортным средством оси z | Вычисленный | m | |||||
Vel | xdot | Передняя скорость колеса вдоль зафиксированной транспортным средством оси X | Вычисленный | m/s | ||||
ydot | Передняя скорость колеса вдоль зафиксированной транспортным средством оси Y | Вычисленный | m/s | |||||
zdot | Передняя скорость колеса вдоль зафиксированной транспортным средством оси z | 0 | m/s | |||||
Steer | WhlAngFL | Передняя сторона оставила руководящий угол колеса | Вычисленный | рад | ||||
WhlAngFR | Передний правильный руководящий угол колеса | Вычисленный | рад | |||||
RearAxl | Disp | x | Заднее смещение колеса вдоль зафиксированной транспортным средством оси X | Вычисленный | m | |||
y | Заднее смещение колеса вдоль зафиксированной транспортным средством оси Y | Вычисленный | m | |||||
z | Заднее смещение колеса вдоль зафиксированной транспортным средством оси z | Вычисленный | m | |||||
Vel | xdot | Задняя скорость колеса вдоль зафиксированной транспортным средством оси X | Вычисленный | m/s | ||||
ydot | Задняя скорость колеса вдоль зафиксированной транспортным средством оси Y | Вычисленный | m/s | |||||
zdot | Задняя скорость колеса вдоль зафиксированной транспортным средством оси z | 0 | m/s | |||||
Steer | WhlAngRL | Задняя часть оставила руководящий угол колеса | Вычисленный | рад | ||||
WhlAngRR | Задний правильный руководящий угол колеса | Вычисленный | рад | |||||
Hitch | Disp | x | Помеха возмещена от плоскости оси вдоль зафиксированной транспортным средством оси X | Входной параметр | m | |||
y | Помеха возмещена от центральной плоскости вдоль зафиксированной транспортным средством оси Y | Входной параметр | m | |||||
z | Помеха возмещена от плоскости оси вдоль зафиксированной землей оси z | Входной параметр | m | |||||
Vel | xdot | Цепляйте скорость смещения вдоль зафиксированной транспортным средством оси X | Вычисленный | m/s | ||||
ydot | Цепляйте скорость смещения вдоль зафиксированной транспортным средством оси Y | Вычисленный | m/s | |||||
zdot | Цепляйте скорость смещения вдоль зафиксированной транспортным средством оси z | Вычисленный | m/s | |||||
Pwr | Ext | Прикладной внешний источник питания | Вычисленный | W | ||||
Hitch | Потери мощности, должные цепляться | Вычисленный | W | |||||
Drag | Потери мощности, должные перетащить | Вычисленный | W | |||||
Geom | Disp | x | Шасси транспортного средства возмещено от плоскости оси вдоль зафиксированной транспортным средством оси X | Входной параметр | m | |||
y | Шасси транспортного средства возмещено от центральной плоскости вдоль зафиксированной транспортным средством оси Y | Входной параметр | m | |||||
z | Шасси транспортного средства возмещено от плоскости оси вдоль зафиксированной землей оси z | Входной параметр | m | |||||
Vel | xdot | Шасси транспортного средства возмещают скорость вдоль зафиксированной транспортным средством оси X | Вычисленный | m/s | ||||
ydot | Шасси транспортного средства возмещают скорость вдоль зафиксированной транспортным средством оси Y | Вычисленный | m/s | |||||
zdot | Шасси транспортного средства возмещают скорость вдоль зафиксированной транспортным средством оси z | 0 | m/s | |||||
Ang | Beta | Угол промаха тела, β
| Вычисленный | рад | ||||
| Сигнал | Описание | Значение | Модули | |||
|---|---|---|---|---|---|---|
PwrInfo | PwrTrnsfrd | PwrFxExt | Внешне поданное продольное питание силы | Вычисленный | W | |
PwrFyExt | Внешне поданное боковое питание силы | Вычисленный | W | |||
PwrMzExt | Внешне поданное питание момента списка | Вычисленный | W | |||
PwrFwFx | Продольная сила прикладывается в передней степени оси | Вычисленный | W | |||
PwrFwFy | Боковая сила прикладывается в передней степени оси | Вычисленный | W | |||
PwrFwRx | Продольная сила прикладывается в степени задней оси | Вычисленный | W | |||
PwrFwRy | Боковая сила прикладывается в степени задней оси | Вычисленный | W | |||
PwrNotTrnsfrd | PwrFxDrag | Продольная степень силы сопротивления | Вычисленный | W | ||
PwrFyDrag | Боковая степень силы сопротивления | Вычисленный | W | |||
PwrMzDrag | Перетащите степень момента подачи | Вычисленный | W | |||
PwrStored | PwrStoredGrvty | Изменение уровня в гравитационной потенциальной энергии | Вычисленный | W | ||
PwrStoredxdot | Скорость изменения продольной кинетической энергии | Вычисленный | W | |||
PwrStoredydot | Скорость изменения боковой кинетической энергии | Вычисленный | W | |||
PwrStoredr | Скорость изменения вращательного отклонения от курса кинетическая энергия | Вычисленный | W | |||
xdot — Кузов продольная скоростьscalarСкорость CG транспортного средства вдоль зафиксированного транспортным средством x- ось, в m/s.
ydot — Скорость ответвления кузоваscalarСкорость CG транспортного средства вдоль зафиксированного транспортным средством y- ось, в m/s.
psi — Отклонение от курсаscalarВращение зафиксированной транспортным средством системы координат о зафиксированном землей Z- ось (отклонение от курса), в рад..
r — Уровень отклонения от курсаscalarСкорость вращения транспортного средства, r, о зафиксированном транспортным средством z- ось (уровень отклонения от курса), в rad/s.
Number of wheels on front axle, NF — Переднее количество колесаscalarКоличество колес на передней оси, NF. Значение является безразмерным.
Number of wheels on rear axle, NR — Заднее количество колесаscalarКоличество колес на задней оси, NR. Значение является безразмерным.
Vehicle mass, m — Масса транспортного средстваscalarМасса транспортного средства, m, в kg.
Longitudinal distance from center of mass to front axle, a — Переднее расстояние осиscalarГоризонтальное расстояние a от CG транспортного средства до передней оси колеса, в m.
Longitudinal distance from center of mass to rear axle, b — Расстояние задней осиscalarГоризонтальное расстояние b от CG транспортного средства до задней оси колеса, в m.
Vertical distance from center of mass to axle plane, h высотаscalarВысота CG транспортного средства выше осей, h, в m.
Longitudinal distance from center of mass to hitch, dh — Расстояние от CM, чтобы цеплятьсяscalarПродольное расстояние от центра массы, чтобы цепляться, dh, в m.
Чтобы включить этот параметр, на панели Input signals, выбирают Hitch forces или Hitch moments.
Vertical distance from hitch to axle plane, hh — Расстояние от помехи до плоскости осиscalarВертикальное расстояние от помехи до плоскости оси, hh, в m.
Чтобы включить этот параметр, на панели Input signals, выбирают Hitch forces или Hitch moments.
Initial inertial frame longitudinal position, X_o — ПоложениеscalarНачальное смещение CG транспортного средства вдоль зафиксированной землей Оси X, в m.
Initial longitudinal velocity, xdot_o — СкоростьscalarНачальная скорость CG транспортного средства вдоль зафиксированной транспортным средством оси X, в m/s.
Для Vehicle Body 3DOF Single Track или блоков Vehicle Body 3DOF Dual Track, чтобы включить этот параметр, устанавливают Axle forces на одну из этих опций:
External longitudinal forces
External forces
Front tire corner stiffness, Cy_f — Жесткость12e3 (значение по умолчанию) | scalarПередняя угловая жесткость шины, Cyf, в N/rad.
Для Vehicle Body 3DOF Single Track или блоков Vehicle Body 3DOF Dual Track, чтобы включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Очистите Mapped corner stiffness.
Rear tire corner stiffness, Cy_r — Жесткость11e3 (значение по умолчанию) | scalarУгловая жесткость задней шины, Cyr, в N/rad.
Для Vehicle Body 3DOF Single Track или блоков Vehicle Body 3DOF Dual Track, чтобы включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Очистите Mapped corner stiffness.
Initial inertial frame lateral displacement, Y_o — ПоложениеscalarНачальное смещение CG транспортного средства вдоль зафиксированной землей Оси Y, в m.
Initial lateral velocity, ydot_o — СкоростьscalarНачальная скорость CG транспортного средства вдоль зафиксированной транспортным средством оси Y, в m/s.
Yaw polar inertia, Izz — ИнерцияscalarОтклонение от курса полярная инерция, в kg*m^2.
Initial yaw angle, psi_o — Вращение PsiscalarВращение зафиксированной транспортным средством системы координат о зафиксированной землей оси Z (отклонение от курса), в рад.
Initial yaw rate, r_o — Уровень отклонения от курсаscalarСкорость вращения транспортного средства о зафиксированной транспортным средством оси z (уровень отклонения от курса), в rad/s.
Longitudinal drag area, Af — Эффективная площадь поперечного сечения транспортного средстваscalarЭффективная площадь поперечного сечения транспортного средства, Af, чтобы вычислить аэродинамическую силу сопротивления на транспортное средство, в m2.
Longitudinal drag coefficient, Cd — Коэффициент аэродинамического сопротивленияscalarКоэффициент аэродинамического сопротивления, Cd. Значение является безразмерным.
Longitudinal lift coefficient, Cl — Воздушный коэффициент лифтаscalarВоздушный коэффициент лифта, Cl. Значение является безразмерным.
Longitudinal drag pitch moment, Cpm — Сделайте подачу перетаскиваютscalarПродольный коэффициент момента подачи перетаскивания, Cpm. Значение является безразмерным.
Relative wind angle vector, beta_w — Угол ветраvectorОтносительный угловой вектор ветра, βw, в рад.
Side force coefficient vector, Cs — Коэффициент силы стороны vectorКоэффициент вектора коэффициентов силы стороны, Cs. Значение является безразмерным.
Yaw moment coefficient vector, Cym — Момент отклонения от курса перетаскиваетvectorКоэффициент вектора коэффициентов момента отклонения от курса, Cym. Значение является безразмерным.
Absolute air pressure, Pabs — Давлениеscalar | scalarЭкологическое абсолютное давление, Pabs, в Па.
Air temperature, Tair — ТемператураscalarЭкологическая абсолютная температура, T, в K.
Чтобы включить этот параметр, очистите Air temperature.
Gravitational acceleration, g — Сила тяжестиscalarГравитационное ускорение, g, в м/с^2.
Nominal friction scaling factor, mu — Масштабный коэффициент тренияscalarНоминальный масштабный коэффициент трения, μ. Значение является безразмерным.
Для Vehicle Body 3DOF Single Track или блоков Vehicle Body 3DOF Dual Track, чтобы включить этот параметр:
Установите Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Очистите External Friction.
Longitudinal velocity tolerance, xdot_tol ДопускscalarПродольный скоростной допуск, в m/s.
Nominal normal force, Fznom — Нормальная силаscalarНоминальная нормальная сила, в N.
Для Vehicle Body 3DOF Single Track или блоков Vehicle Body 3DOF Dual Track, чтобы включить этот параметр, устанавливают Axle forces на одну из этих опций:
External longitudinal velocity
External longitudinal forces
Geometric longitudinal offset from axle plane, longOff — Продольное смещениеscalarСмещение шасси транспортного средства от плоскости оси вдоль зафиксированной телом оси X, в m. Когда вы используете 3D механизм визуализации, рассматриваете использование смещения, чтобы определить местоположение шасси, независимого от CG транспортного средства.
Geometric lateral offset from center plane, latOff — Боковое смещениеscalarСмещение шасси транспортного средства от центральной плоскости вдоль зафиксированной телом оси Y, в m. Когда вы используете 3D механизм визуализации, рассматриваете использование смещения, чтобы определить местоположение шасси, независимого от CG транспортного средства.
Geometric vertical offset from axle plane, vertOff — Вертикальное смещениеscalarСмещение шасси транспортного средства от плоскости оси вдоль зафиксированной телом оси z, в m. Когда вы используете 3D механизм визуализации, рассматриваете использование смещения, чтобы определить местоположение шасси, независимого от CG транспортного средства.
Wrap Euler angles, wrapAng — Выборoff (значение по умолчанию) | onПеренесите Углы Эйлера к интервалу [-pi, pi]. Для маневров транспортного средства, которые могут подвергнуться вращениям отклонения от курса транспортного средства, которые находятся вне интервала, рассмотрите отмену выбора параметра, если вы хотите:
Отследите общее вращение отклонения от курса транспортного средства.
Избегайте разрывов в средствах оценки состояния транспортного средства.
[1] Гиллеспи, Томас. Основные принципы динамики аппарата. Варрендэйл, PA: ассоциация инженеров автомобилестроения (SAE), 1992.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.