Сгенерируйте пандус положения фиксированной частоты
Motor Control Blockset / Средства управления / Ссылка Управления
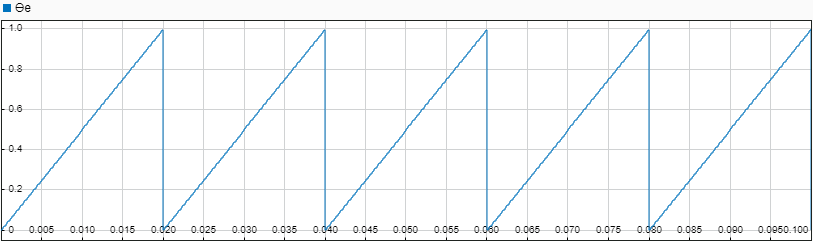
Блок Position Generator генерирует сигнал пандуса положения (с частотой, которая идентична тому из ссылочного сигнала напряжения), использование значения шага положения опорного сигнала.