Методические рекомендации должны выбрать длительность контрольного интервала (свойство Ts контроллера) первоначально, и затем содержать его постоянный, когда вы настраиваете другие параметры контроллера. Если становится очевидно, что исходный выбор был плох, можно пересмотреть Ts. Если вы делаете так, вы можете затем должны быть повторно настроить другие настройки.
Качественно, когда Ts уменьшается, отклонение неизвестного воздействия обычно улучшается и затем выравнивается. Значение Ts, в которых плато эффективности зависит от динамических характеристик объекта.
Однако, когда Ts становится маленьким, вычислительное усилие увеличивается существенно. Таким образом оптимальным выбором является баланс эффективности и вычислительного усилия.
В Прогнозирующем Управлении Модели, горизонте предсказания, p является также важным соображением. Если вы принимаете решение содержать длительность горизонта предсказания (продукт p *Ts) постоянный, p должен измениться обратно пропорционально Ts. Много размеров массивов пропорциональны p. Таким образом, как p увеличения, требования к памяти контроллера и увеличение времени решения QP.
Рассмотрите следующее при выборе Ts:
Как грубая инструкция, набор Ts между 10% и 25% вашего минимального желаемого времени отклика с обратной связью.
Запустите по крайней мере одну симуляцию, чтобы видеть, улучшается ли неизмеренное подавление помех значительно, когда Ts разделен на два. Если так, считайте пересмотр Ts.
Для управления процессом Ts>> 1 с распространена, особенно когда MPC контролирует одноконтурные контроллеры низшего уровня. Другие приложения, такой как автомобильные или космос, могут потребовать Ts <1 с. Если время, необходимое для решения QP в режиме реального времени, превышает желаемый контрольный интервал, рассмотрите Явную возможность MPC.
Для объектов с задержками количество переменных состояния, необходимых для моделирования задержек, обратно пропорционально Ts.
Для разомкнутого контура нестабильные объекты, если p *Ts является слишком большим, таким, что переходные процессы объекта становятся бесконечными во время этого количества времени, основные параметры, необходимые для вычислений MPC стать неопределенными, генерируя сообщение об ошибке.
Контроллер наследовал его единицу измерения времени от модели объекта управления. А именно, диспетчер использует TimeUnit свойство объекта LTI модели объекта управления. Это свойство значения по умолчанию к секундам.
Предположим, что текущим контрольным интервалом является k. prediction horizon, p, является количеством будущих контрольных интервалов, которые контроллер MPC должен оценить предсказанием при оптимизации его MVS в контрольном интервале k.
Методические рекомендации должны выбрать p рано в проектировании контроллера и затем содержать его постоянный при настройке других настроек контроллера, таких как веса функции стоимости. Другими словами, не используйте корректировки p к контроллеру, настраивающемуся. Скорее значение p должно быть таково, что диспетчер внутренне устойчив и ожидает нарушения ограничений достаточно рано, чтобы позволить корректирующее действие.
Если желаемым временем отклика с обратной связью является T, и контрольным интервалом является Ts, попробуйте p, таким образом что T ≈ pTs.
Задержки объекта налагают нижнюю границу на возможное время отклика с обратной связью. Выберите p соответственно. Чтобы проверять на нарушение этого условия, используйте review команда.
Методические рекомендации должны увеличить p, пока дальнейшие увеличения не оказывают незначительное влияние на эффективность. Если объект является нестабильным разомкнутым контуром, максимальный p является количеством контрольных интервалов, требуемых для переходного процесса разомкнутого контура объекта стать бесконечным. p> 50 редко необходим, если Ts слишком не мал.
Неблагоприятные характеристики объекта, объединенные с маленьким p, могут сгенерировать внутренне нестабильный контроллер. Чтобы проверять на это условие, используйте review команда и увеличение p, если это возможно. Если p является уже большим, рассмотрите следующее:
Увеличьте Ts.
Увеличьте веса функции стоимости на шаге мВ.
Измените горизонт управления или используйте блокирование мВ (см., что Переменная, которой Управляют, Блокируется).
Используйте маленький p со взвешиванием терминала, чтобы аппроксимировать поведение LQR (См. Терминальные Веса и Ограничения).
Горизонт управления, m, является количеством перемещений мВ, которые будут оптимизированы в контрольном интервале k. Горизонт управления падает между 1 и горизонт предсказания p. Значением по умолчанию является m = 2. Независимо от вашего выбора для m, когда контроллер действует, используется оптимизированное перемещение мВ в начале горизонта, и любые другие отбрасываются.
Причины сохранить m <<p следующие:
Маленький m означает меньше переменных вычислять в QP, решенном в каждом контрольном интервале, который способствует более быстрым расчетам.
Если объект включает задержки, m <p важен. В противном случае некоторые перемещения мВ не могут влиять ни на один объект выходные параметры перед концом горизонта предсказания, ведя к сингулярной матрице Гессиана QP. Чтобы проверять на нарушение этого условия, используйте review команда.
Маленький m продвигает (но не гарантирует), внутренне устойчивый контроллер.
Можно задать шаг расчета, горизонт предсказания, и управлять горизонтом при создании mpc контроллер в командной строке. После создания контроллера, mpcObj, можно изменить шаг расчета и горизонты путем установки следующих свойств контроллера:
Шаг расчета — mpcObj.Ts
Горизонт предсказания — mpcObj.p
Управляйте горизонтом — mpcObj.m
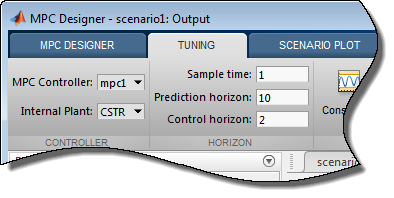
Кроме того, при разработке контроллера MPC, использующего приложение MPC Designer, во вкладке Tuning, в разделе Horizon, можно изменить шаг расчета и горизонты.