

Линейный привод с перемещением поршня, управляемым двумя противоположными полостями с терможидкостью
Тепловая Жидкость/Приводы
Блок Double-Acting Actuator (TL) моделирует линейный привод перемещением поршня, которым управляют две противостоящих емкости с тепловой жидкостью. Привод генерирует силу при ходе расширения и втягивании. Сгенерированная сила зависит от перепада давлений между двумя емкостями.
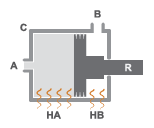
Рисунок показывает ключевые компоненты модели привода. Порты А и B представляют тепловые жидкие входы емкости. Порт R представляет поршень привода перевода и порт C случай привода. HA портов и HB представляют тепловые интерфейсы между каждой емкостью и средой. Движущийся поршень принят совершенно изоляционный.
Схематичный привод двойного действия
Направление перемещения поршня зависит от механической установки ориентации в диалоговом окне блока. Если механическая ориентация положительна, то более высокое давление в порте А дает к положительному поршневому переводу относительно случая привода. Направление движения инвертирует для отрицательной механической ориентации.
Набор жестких упоров ограничивает поршневую область значений движения. Жесткие упоры обработаны как системы пружинного демпфера. Пружинный коэффициент жесткости управляет укрепляющим компонентом силы контакта жесткого упора и коэффициента демпфирования диссипативный компонент.
Жесткие упоры расположены в дистальных концах хода поршня. Если механическая ориентация положительна, то более низкий жесткий упор в x = 0 и верхний жесткий упор в x = +stroke. Если механическая ориентация отрицательна, то более низкий жесткий упор в x =-stroke и верхний жесткий упор в x = 0.
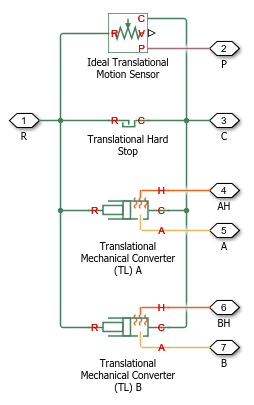
Этот блок является составным объектом, компонентно-ориентированным на блоках Основы Simscape™:
Составная диаграмма компонентов
Ориентация поршня привода относительно направления потока. Положительная ориентация заставляет поршень перемещаться в положительное направление относительно привода, случающегося в ответ на положительную скорость потока жидкости через порт А. Настройкой по умолчанию является Positive.
Механическая ориентация влияет на размещение жестких упоров привода. Один жесткий упор всегда в нуле положения. Второй жесткий упор на расстоянии хода поршня, если механическая ориентация положительна и в минус расстояние хода поршня, если механическая ориентация отрицательна.
Область, нормальная к направлению потока в полости привода A. Блок использует эту область, чтобы вычислить гидравлическую силу из-за жидкого давления в емкости A. Поршневая площадь поперечного сечения должна быть больше нуля. Значением по умолчанию является 0.01 м^2.
Область, нормальная к направлению потока в полости привода B. Блок использует эту область, чтобы вычислить гидравлическую силу из-за жидкого давления в емкости B. Поршневая площадь поперечного сечения должна быть больше нуля. Значением по умолчанию является 0.01 м^2.
Максимальное расстояние поршень привода может переместиться. Ход поршня должен быть больше нуля. Значением по умолчанию является 0.1 m.
Жесткие упоры ограничивают перемещение поршня длиной хода поршня. Один жесткий упор расположен в нуле положения. Второй жесткий упор на расстоянии хода поршня, если Mechanical Orientation установлен в Positive и в минус ход поршня, если Mechanical Orientation установлен в Negative.
Объем жидкости, остающийся в полости привода в нулевом перемещении поршня. Блок использует этот объем с учетом массового хранения и аккумулирования энергии в емкости, когда поршень в нуле положения. Мертвый объем должен быть больше нуля. Значением по умолчанию является 1e-5 м^3.
Объем жидкости, остающийся в полости привода B в нулевом перемещении поршня. Блок использует этот объем с учетом массового хранения и аккумулирования энергии в емкости B, когда поршень в нуле положения. Мертвый объем должен быть больше нуля. Значением по умолчанию является 1e-5 м^3.
Выбор давления среды. Опции включают Atmospheric pressure и Specified pressure. Выбор Specified pressure отсоединяет дополнительный параметр, Environment pressure.
Давление вне преобразования регистра привода. Это давление действует против давлений в полостях привода. Значение нуля соответствует вакууму. Значением по умолчанию является 0.101325 MPa. Этот параметр отображается только, когда Environment pressure specification установлен в Specified pressure.
Коэффициент Spring жестких упоров привода. Пружинный коэффициент составляет укрепляющий фрагмент силы контакта жесткого упора. Увеличьте содействующее значение к модели, тяжелее связываются. Значением по умолчанию является 1e10 N/m.
Коэффициент демпфирования жестких упоров привода. Коэффициент демпфирования определяет диссипативную часть силы контакта жесткого упора. Увеличьте содействующее значение, чтобы уменьшать возврат на контакт. Значением по умолчанию является 150 N/(m/s).
Методы моделирования для жестких упоров. Опции включают:
Stiffness and damping applied smoothly through transition region (значение по умолчанию) — Масштаб силы контакта от нуля до ее полного значения на заданной длине. Масштабирование является полиномом по своей природе. Функция масштабирования полинома численно является гладкой, и она не производит нулевых пересечений любого вида.
Full stiffness and damping applied at bounds, undamped rebound — Примените полное значение вычисленной силы контакта при нарушении жесткого упора. Сила контакта является соединением упругих и демпфирующих сил во время проникновения и упругой силы — без демпфирующей составляющей — во время восстановления. Никакое сглаживание не применяется.
Full stiffness and damping applied at bounds, damped rebound — Примените полное значение вычисленной силы контакта при нарушении жесткого упора. Сила контакта является соединением упругих и демпфирующих сил и во время проникновения и во время восстановления. Никакое сглаживание не применяется. Это - модель жесткого упора, используемая в предыдущих релизах.
Расстояние, ниже которого масштабирование применяется к силе жесткого упора. Сила контакта является нулем, когда расстояние до жесткого упора равно значению, заданному здесь. Это в его полном значении, когда расстояние до жесткого упора является нулем. Значение по умолчанию 1mm.
Положение поршня в начале симуляции. Это значение должно быть между нулем и ходом поршня, если параметр Mechanical orientation устанавливается на Positive. Это должно быть между нулем и минус ход поршня, если параметр Mechanical orientation устанавливается на NegativeЗначение по умолчанию 0 m.
Температура в полости привода в начале симуляции. Значением по умолчанию является 293.15 K.
Температура в полости привода B в начале симуляции. Значением по умолчанию является 293.15 K.
Опция к эффектам модели из-за жидкой динамической сжимаемости. Выберите On включить жидкую динамическую сжимаемость и Off отключить его.
Давление в полости привода в начале симуляции. Значением по умолчанию является 0.101325 MPa.
Давление в полости привода B в начале симуляции. Значением по умолчанию является 0.101325 MPa.
А - порт терможидкости, представляющий полость А привода
B Тепловая жидкая полость привода представления порта сохранения B
C Порт сохранения механического устройства, представляющий случай привода
R Порт сохранения механического устройства, представляющий поршень привода
HA — Тепловой порт сохранения, представляющий тепловой интерфейс между емкостью A и средой
HB — Тепловой порт сохранения, представляющий тепловой интерфейс между емкостью B и средой
P — выходной порт Физического сигнала для данных о положении поршня