

Гидравлический привод клапана двойного действия управляется четырьмя давлениями
Приводы клапана

Блок Hydraulic 4-Port Cartridge Valve Actuator представляет гидравлический привод клапана двойного действия, управляемый четырьмя давлениями. Используйте его в качестве экспериментального привода для распределителей, прооперированного пилотами давления и распределительных клапанов и аналогичных устройств. Принципиальную схему привода распределителя с 4 портами показывают на следующем рисунке.
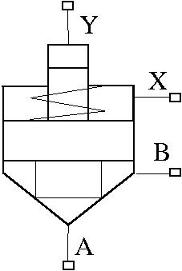
Привод управляет клапаном (золотник, тарелка, и так далее), чье положение зависит от давлений в портах А, B, X, и Y и упругой силы. Давления в портах А и B имеют тенденцию открывать клапан, в то время как давления в X и Y портов управления, вместе с упругой силой, действуют, чтобы закрыть его. Модель не составляет потребление потока и загружающие силы, кроме сил давления и пружины.
Инерционные свойства привода составляются путем добавления задержки первого порядка между установившимися и фактическими смещениями клапана. Задержка симулирована с комбинацией Усиления PS и блоков Интегратора PS, окутанных обратной связью единицы.
Клапан остается закрытым, пока совокупная сила давления ниже, чем предварительное поджатие пружины. Тарелка обеспечена от ее места, когда усилие предварительной нагрузки достигнуто и перемещается вверх пропорционально к увеличению давления, пока это не передает полный цикл.
Сила, действующая на тарелку и смещение тарелки, вычисляется следующими уравнениями:
где
| FP | Сила давления, действующая на тарелку |
| pA, pB, pX, pY | Давления в портах А, B, X, и Y, соответственно |
| AA, AB, AX, AY | Области в портах А, B, X, и Y, соответственно. Областями в портах А и Y являются параметры блоков. Площадь в порте X определена его отношением на в порте А, AA / AX. Область в порте B определяется как AB = AX – AA. |
| x | Фактическое смещение тарелки |
| xs | Установившееся смещение тарелки |
| xmax | Полный цикл |
| FPR | Предварительное поджатие пружины |
| kspr | Коэффициент упругости |
Связи A, B, X, и Y являются гидравлическими портами, сопоставленными с портами привода. Связь P является портом физического сигнала, выход которого соответствует смещению тарелки. Давления, поданные на порты А и B, перемещают тарелку в положительное или отрицательное направление, в зависимости от значения параметра Actuator orientation. Давления в портах X and Y действуют в противоположном направлении к давлениям в портах А и B.
Потребление потока, сопоставленное с движением клапана, принято, чтобы быть незначительным.
Инерция, трение и гидравлические осевые усилия приняты, чтобы быть малыми и не учтены.
Эффективная область тарелки в порте А. Значение параметров должно быть больше нуля. Значением по умолчанию является 3.3e-4 м^2.
Отношение между областями тарелки в порте А и порте X. Значение параметров должно быть больше нуля. Значением по умолчанию является 0.66.
Эффективная площадь базового поршня в порте Y. Значение параметров должно быть больше нуля. Значением по умолчанию является 1.65e-4 м^2.
Предварительное поджатие пружины. Значением по умолчанию является 26 N.
Коэффициент упругости. Значением по умолчанию является 1.4e4 N/m.
Максимальный диапазон тарелки. Значение параметров должно быть больше нуля. Значением по умолчанию является 5e-3 m.
Начальный разрыв между тарелкой и местом. Значение параметров должно быть больше или быть равным нулю. Значение по умолчанию 0.
Постоянная времени задержки первого порядка. Значением по умолчанию является 0.01 s.
Задает ориентацию привода относительно глобального положительного направления. Привод может быть установлен двумя различными способами, в зависимости от того, перемещает ли он тарелку в положительном или в отрицательном направлении при подаче давления на вход. Если давления, поданные на порты А и B, перемещают тарелку в обратном направлении, устанавливают параметр на Acts in negative direction. Значением по умолчанию является Acts in positive direction.
Блок имеет следующие порты:
AГидравлический порт сопоставлен с входом клапана.
BГидравлический порт сопоставлен с выходом клапана.
XГидравлический порт сопоставлен с терминалом управления клапана.
YГидравлический порт сопоставлен с терминалом управления клапана.
PПорт физического сигнала то выходное смещение тарелки.
Для примера использования этого блока смотрите, что Инжекция Прессует Системный пример Приведения в действие.