

Приводом двойного действия или одностороннего действия управляет экспериментальное давление в изотермической жидкой сети
Simscape / Жидкости / Valve Actuators & Forces

Блок Pilot Valve Actuator (IL) моделирует привод двойного действия или одностороннего действия, которым управляет экспериментальное давление для управления подключенного клапана или отверстия в изотермической жидкой сети. Для привода одностороннего действия, когда давление управления, P X – банкомат P, превышает Spring preload force at port X, поршень начинает приводить в движение в направлении, присвоенном параметром Mechanical orientation. Для привода двойного действия давление управления управление P является различием между P X – банкомат P и P Y – банкомат P. Поршень приводит в движение в направлении большего прикладного перепада давления и выступает против упругой силы в противоположном порте. Когда перемещение поршня инвертирует, этой пружиной не расширяет и не порождает силу уравновешивания на положение поршня. Поршни в порте X и порте Y присоединены к одному золотнику. Обе пружины восстанавливают золотник к его нейтральному положению, когда золотник F падает ниже противостоящего предварительного поджатия пружины. Для приводов одностороннего действия нейтральное положение в порте X. Для приводов двойного действия нейтральное положение находится в центре привода.
Сила на поршне создается перепадом давления между портом X и атмосферным давлением:
где A X является Piston area at port X. Когда золотник F больше Spring preload force at port X, поршень начинает перемещаться.
Схематичный из гидропривода одностороннего действия
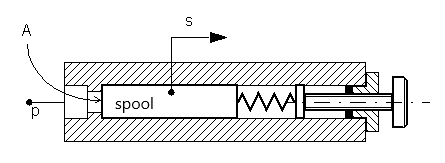
Мгновенное перемещение поршня вычисляется как:
где устойчивое положение поршня, устойчивый x, является положением поршня при текущем перепаде давления, пропорциональном упругой силе в максимальном ходе поршня:
где:
F пред является Spring preload force at port X.
F макс. является максимальной упругой силой, действующей против перемещения поршня, где K является Spring stiffness at port X.
Диапазоном x является Piston stroke from port X.
ε является Mechanical orientation, который указывает на поршневое перемещение в положительном направлении (дополнительное) или отрицательное направление (сокращение).
Если сила на поршне меньше Spring preload force at X, поршень остается в нейтральном положении или перемещается в нейтральное положение. Если сила на поршне соответствует или превышает максимальную упругую силу, поршень остается в диапазоне до прикладных скачков давления.
Различие между силами в портах X и Y диктует перемещение поршня:
Давление, поданное на порт X, переключает золотник далеко от емкости в X и действует против пружины в порте Y. С другой стороны давление, поданное на порт Y, переключает золотник далеко от емкости в Y и действует против пружины в порте X. Когда золотник инвертирует направление, раньше расширенные пружинные сжатия, порождая силу на золотник. Раньше сжатая пружина, пружина в порте в направлении движения, не расширяет и не имеет влияния положение золотника.
Схематичный из привода двойного действия
Перемещение поршня вычисляется как:
где устойчивое положение поршня, устойчивый x, является положением поршня при текущем перепаде давления, пропорциональном упругой силе в максимальном ходе поршня:
где:
F пред, X и F пред, Y является Spring preload force at port X и Spring preload force at port Y, соответственно.
F макс., X и F макс., Y являются максимальными упругими силами, действующими против перемещения поршня в портах X и Y, соответственно, где:
K является Spring stiffness at port X и Spring stiffness at port Y в течение пружины в каждом порте.
Диапазоном x является Piston stroke from port X и Piston stroke from port Y для соответствующих портов.
ε является Mechanical orientation, который присваивает сигнал для поршневого перемещения как положительный (дополнительный) или отрицательный (сокращение).
Если сила на поршне меньше предварительного поджатия пружины соответствующего порта, поршень остается или возвращается к нейтральному положению. Если сила на поршне соответствует или превышает максимальную упругую силу для соответствующего порта, поршень остается в ходе поршня до прикладных скачков давления.
Привод распределителя (IL) | Привод двойного действия (IL) | Прооперированный пилотами запорный клапан (IL) | Гидропривод одностороннего действия (IL)