

Упрощенная модель драйвера клапана
Приводы клапана

Блок Valve Actuator представляет упрощенную модель привода клапана, который особенно подходит для в реальном времени и HIL (оборудование в цикле) симуляция. Ее функциональность похожа на 2-Position Valve Actuator и блоки 3-Position Valve Actuator, но ее характеристика требует меньшего количества параметров, потому что он создается из компонентов, которые практически линейны.
Блок Valve Actuator создается с помощью блоков из библиотеки Simscape™ Physical Signals. И вход и выход блока являются физическими сигналами. Блок-схему модели показывают в следующем рисунке.

Усиление блока PS Gain 1 устанавливает установившееся отношение между сигналами ввода и вывода. Блок PS Saturation сохраняет выходной сигнал в +/– область значений диапазона клапана. Усиление блока PS Gain 2 является 1/Time constant, который позволяет воспроизвести задержку первого порядка путем объединения этого блока с PS, Вычитают и блоки Интегратора PS.
Передаточная функция задержки
где T является постоянной времени. Усиление блока PS Gain 3 установлено в 1.
Примечание
Этот блок создается из блоков из библиотеки Simscape Physical Signals (таких как PS Add, PS Gain, и так далее). В настоящее время блоки в библиотеке Physical Signals не поддерживают модульное распространение и проверку. Для получения дополнительной информации смотрите, Как работать с Физическими единицами измерения.
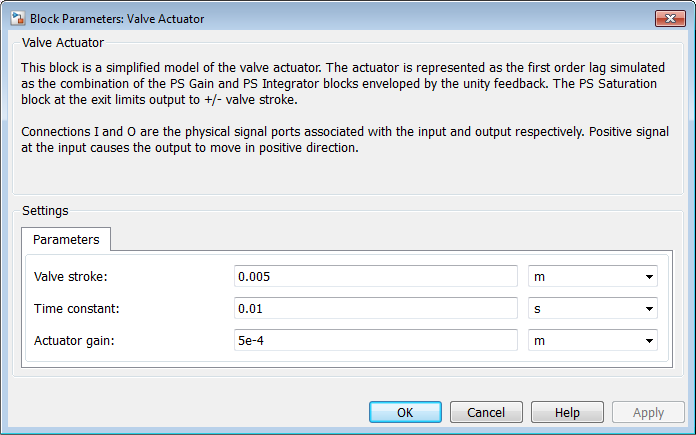
Желаемый диапазон клапана, который задает уровень насыщенности блока PS Saturation в модели привода. Выход привода остается в рамках +/– область значений диапазона клапана. Значением по умолчанию является 0.005 m.
Постоянная времени задержки первого порядка. Параметр Gain блока PS Gain 2 равен 1/Time constant. Значением по умолчанию является 0.01 s.
Усиление блока PS Gain 1 в блок-схеме модели привода. Значением по умолчанию является 5e-4 m.
Блок имеет один входной порт физического сигнала и один выходной порт физического сигнала.