Chain Drive
Система механической передачи с цепью и двумя звездочками
Описание
Блок Chain Drive представляет систему механической передачи цепью и двумя звездочками. Цепь сцепляется со звездочками, передавая вращательное движение между двумя. Механическая передача может произойти наоборот, то есть, от доведенного звездочка драйвера, из-за внешних загрузок. Это условие известно как установку в нужное состояние "обратным путем".
Цепь диска совместима. Это может простираться под силой или ослабить, если свободный. Модель податливости состоит из линейного набора пружинного демпфера в параллельном расположении. Пружина сопротивляется растяжимой деформации в цепи. Демпфер сопротивляется растяжимому движению между цепочечными элементами.
Пружина и силы демпфера действуют непосредственно на звездочки, которые соединяет цепь. Упругая сила присутствует, когда одна цепочечная ветвь является тугой. Сила демпфера присутствует постоянно. Чтобы представлять и сообщить об условии отказа, симуляция останавливает и генерирует ошибку, если сетевая растяжимая сила в цепи превышает заданное максимальное значение силы.
Блок составляет вязкое трение в подшипниках соединения звездочки. Во время движения вязкое трение вызывает потери механической передачи, уменьшая КПД цепного привода. Эти потери соединяют из-за цепочечного затухания. Чтобы устранить потери механической передачи в цепочечном диске, в настройках Dynamic, устанавливают параметры для вязкого трения и затухания цепи, чтобы обнулить.
Уравнения
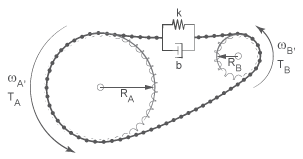
Растяжимый уровень деформации в цепи является различием между звездочкой тангенциальные скорости, которые являются каждым продукт радиусов подачи и скорости вращения. Математически,
где:
x является растяжимой деформацией.
ωA, ωB является скоростями вращения звездочки.
RA, RB является радиусами подачи звездочки.
Рисунок показывает следующие переменные.
Цепочечная растяжимая сила является сетевой суммой сил демпфера и пружины. Упругая сила является продуктом растяжимой деформации и пружинной постоянной жесткости. Эта сила является нулем, когда растяжимая деформация меньше, чем слабая цепь. Сила демпфера является продуктом растяжимого уровня деформации и коэффициента демпфирования. Математически,
где:
Цепь проявляет крутящий момент на каждой звездочке, равной продукту растяжимой силы и радиуса подачи звездочки. Два крутящих момента действуют в противоположных направлениях согласно этим уравнениям:
Где:
τA является крутящим моментом, что цепь применяет на звездочку A.
τB является крутящим моментом, что цепь применяет на звездочку B.
В терминах скорости и фактора трения, применяются эти уравнения:
Где:
ωA является вращательной скоростью для звездочки A.
ωB является вращательной скоростью для звездочки B.
μA является коэффициентом вязкого трения для звездочки A.
μB является коэффициентом вязкого трения для звездочки B.
Переменные
Используйте вкладку Variables, чтобы установить приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
В отличие от параметров блоков, переменные не имеют условной видимости. Вкладка перечисляет все существующие переменные в блоках. Если переменная не используется в системе уравнений, соответствующей выбранной настройке блока, значения, заданные для этой переменной, проигнорированы.
Порты
Сохранение
развернуть все
A — Звездочка A
вращательное механическое устройство
Сохранение вращательного порта, сопоставленного со звездочкой A.
B — Звездочка B
вращательное механическое устройство
Сохранение вращательного порта, сопоставленного со звездочкой B.
Параметры
развернуть все
Геометрия
Chain model — Цепочечная податливость и модель обратной реакции
Ideal - no chain compliance or backlash (значение по умолчанию) | Model chain compliance and backlash
Податливость и модель обратной реакции для блока:
Ideal - no chain compliance or backlash — Не моделируйте цепочечную жесткость, затухание или обратную реакцию.
Model chain compliance and backlash — Цепочечная жесткость модели, затухание и обратная реакция.
Зависимости
Если этот параметр является набором Model chain compliance and backlash, связанные параметры и переменные включены.
Sprocket A pitch radius — Звездочка радиус подачи A
80
mm (значение по умолчанию) | скаляр
Радиус круга подачи для звездочки A. Круг подачи является мнимым кругом, проходящим через контактную точку между цепочечным роликом и винтиком звездочки в полном включении.
Sprocket B pitch radius — Звездочка радиус подачи B
40
mm (значение по умолчанию) | скаляр
Радиус круга подачи для звездочки B. Круг подачи является мнимым кругом, проходящим через контактную точку между цепочечным роликом и винтиком звездочки в полном включении.
Chain slack length — Максимум ослабляет длину
50 mm (значение по умолчанию) | скаляр
Максимальное расстояние, которое может переместить свободная ветвь цепи диска, прежде чем это будет тугим. Это расстояние равняется различию в длине между фактическими и полностью тугими цепями диска.
Если одна звездочка сохранена на месте, в то время как главная цепочечная ветвь является тугой, то слабая длина является тангенциальным расстоянием, которое должна вращать вторая звездочка, прежде чем более низкая цепочечная ветвь становится тугой.
Зависимости
Этот параметр включен, когда Chain model установлен в Model chain compliance and backlash.
Динамика
Chain stiffness — Линейный коэффициент упругости
1e5
N/m (значение по умолчанию) | скаляр
Линейный коэффициент упругости в цепочечной модели податливости. Эта константа описывает цепочечное сопротивление деформации. Пружинный элемент составляет эластичное аккумулирование энергии в цепи из-за деформации.
Зависимости
Этот параметр включен, когда Chain model установлен в Model chain compliance and backlash.
Chain damping — Линейный коэффициент демпфирования
5 N/(m/s) (значение по умолчанию) | скаляр
Линейный коэффициент демпфирования в цепочечной модели податливости. Этот коэффициент описывает сопротивление растяжимому движению между смежными элементами в цепи. Элемент демпфера вычисляет потери мощности в цепи из-за деформации.
Зависимости
Этот параметр включен, когда Chain model установлен в Model chain compliance and backlash.
Viscous friction coefficient of sprocket A — Звездочка трение A
0.001 N*m/(rad/s) (значение по умолчанию)
Коэффициент трения из-за прокручивающегося действия подшипника соединения для звездочки A в присутствии вязкой смазки.
Viscous friction coefficient of sprocket B — Звездочка трение B
0.001 N*m/(rad/s) (значение по умолчанию)
Коэффициент трения из-за прокручивающегося действия подшипника соединения для звездочки B в присутствии вязкой смазки.
Максимальная сила
Эти настройки включены, когда Chain model установлен в Model chain compliance and backlash.
Maximum tension — Натяните предельную модель
No maximum tension (значение по умолчанию) | Specify maximum tension
Выберите, ограничить ли максимальную растяжимую силу в цепи диска.
No maximum tension — Цепочечная сила может быть произвольно большой в процессе моделирования.
Specify maximum tension — Цепочечная сила должна остаться ниже, чем максимальное значение. Если сила превышает это значение, симуляция генерирует ошибку и остановки.
Зависимости
Когда этот параметр устанавливается на Specify maximum tension, связанные параметры включены.
Этот параметр включен, когда Chain model установлен в Model chain compliance and backlash.
Chain maximum tension — Верхний предел силы
1e6
N (значение по умолчанию)
Максимальное позволенное значение растяжимой силы, действующей в цепи.
Зависимости
Этот параметр включен, когда оба из этих условий соблюдают:
В настройках Geometry параметр Chain model устанавливается на Model chain compliance and backlash.
Я - настройки Maximum tension, параметр Maximum tension устанавливается на Specify maximum tension.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Представленный в R2012a