Double-Shoe Brake
Фрикционный тормоз с два вертелся обувь, диаметрально расположенная о вращающемся барабане с инициированным сбоем
Описание
Блок Double-Shoe Brake представляет фрикционный тормоз два, вертелся твердая обувь, которая нажимает против вращающегося барабана, чтобы произвести торможение. Твердая обувь находится внутри или снаружи вращающегося барабана в диаметрально противоположной настройке. Положительная сила приведения в действие заставляет твердую обувь нажимать против вращающегося барабана. Вязкий и трение контакта между барабаном и твердыми поверхностями обуви заставляют вращающийся барабан замедляться.
Тормоза двойной обуви предоставляют высокому тормозному моменту маленькие отклонения привода в приложениях, которые включают моторные транспортные средства и некоторое тяжелое машиностроение. Модель использует простую параметризацию с с готовностью доступной геометрией тормоза и параметрами трения.
Можно также позволить дать сбой. Когда сбой произойдет, пояс породит заданную пользователями силу. Отказы могут произойти в требуемое время или из-за внешнего триггера в порте T.
Уравнения
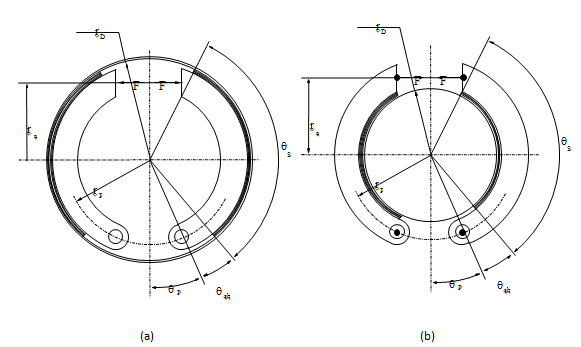
В схематическом, a) представляет внутренний тормоз двойной обуви и b) представляет внешний тормоз двойной обуви. В обеих настройках положительная сила приводов F сводит обувь и поверхности трения барабана. Результатом является момент трения, который вызывает замедление вращающегося барабана. Нуль и отрицательные силы не сводят обувь и поверхности трения барабана и производят нулевой тормозной момент.
Модель использует приближение длинной обуви. Уравнения для момента трения, который разрабатывает начальная и конечная обувь:
где для ,
и для ,
Где:
TLS является моментом привода, который разрабатывает ведущая обувь.
TTS является моментом привода, который разрабатывает запаздывающая обувь.
μ является эффективным коэффициентом трения контакта.
pa является максимальным линейным давлением в ведущем контакте барабана обуви.
pb является максимальным линейным давлением в запаздывающем контакте барабана обуви.
rD является радиусом барабана.
θsb является углом начала обуви.
θs является углом промежутка обуви.
θa является углом от контакта стержня до максимальной точки давления.
c является продолжительностью руки цилиндрической силы относительно контакта стержня.
rp является радиусом местоположения контакта.
θp является углом местоположения контакта стержня.
ra является радиусом местоположения привода.
В модели принимается, что только трение Кулона действует в контакте поверхности барабана обуви. Обнулите относительную скорость между барабаном, и обувь производит нулевое трение Кулона. Чтобы избежать разрыва при нулевой относительной скорости, содействующая формула трения использует гиперболическую функцию
где:
μ является эффективным коэффициентом трения контакта.
μCoulomb является коэффициентом трения контакта.
ωshaft является скоростью вала.
ωthreshold является порогом скорости вращения.
Балансировка моментов, которые действуют на каждую обувь относительно контакта, дает к давлению, действующему в контакте поверхности барабана обуви. Уравнения для определения баланса моментов для ведущей обуви
и
где:
F является силой приводов.
MN является моментом, действуя на ведущую обувь из-за нормальной силы.
MF является моментом, действуя на ведущую обувь из-за силы трения.
c является продолжительностью руки цилиндрической силы относительно контакта стержня.
pa является максимальным линейным давлением в поверхности контакта барабана обуви.
rp является радиусом местоположения контакта.
θp является углом местоположения контакта стержня.
ra является радиусом местоположения привода.
Модель не симулирует тормоза с автоблокировкой. Если геометрия тормоза и параметры трения вызывают условие с автоблокировкой, модель производит ошибку симуляции. Тормоз самоблокирует, если момент трения превышает момент из-за нормальных сил, то есть, когда MF> MN.
Баланс моментов для запаздывающей обуви
Сетевой тормозной момент
где μvisc является коэффициентом вязкого трения.
Дефектное поведение
Когда отказы включены, сила пояса прикладывается в ответ на одну или оба из этих триггеров:
Если триггер отказа происходит, входная сила заменяется значением Belt force when faulted для остатка от симуляции. Значение 0 подразумевает, что никакое торможение не произойдет. Относительно большое значение подразумевает, что тормоз застревает.
Можно установить блок выпускать дефектную ведомость как предупреждающее сообщение или сообщение об ошибке в Средстве просмотра Диагностики Simulink параметром Reporting when fault occurs.
Тепловая модель
Можно смоделировать эффекты теплового потока и изменения температуры путем осушения дополнительного теплового порта. Чтобы осушить порт, в настройках Friction, устанавливают параметр Thermal Port на Model. Осушение порта также отсоединяет или изменяет значение по умолчанию для этих связанных настроек, параметров и переменных:
Переменные
Используйте настройки Variables, чтобы установить приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
ЗависимостиПеременные настройки отображаются только, когда в настройках Friction параметр Thermal port устанавливается на Model.
Ограничения и предположения
Свяжитесь с углами, меньшими, чем 45 ° приводят к менее точным результатам.
Тормоз использует приближение длинной обуви.
Геометрия тормоза не самоблокирует.
Модель не составляет потребление потока привода.
Порты
Входной параметр
развернуть все
F — Приведение в действие силы
физический сигнал
Входной порт физического сигнала сопоставлен с прикладывавшей силой приведения в действие.
T — Внешний триггер отказа
физический сигнал
Порт физического сигнала для внешнего триггера отказа. Инициирование происходит, когда значение больше 0.5. Нет никакого модуля, сопоставленного с триггерным значением.
Зависимости
Этот порт отображается, когда Enable faults установлен в On и Enable external fault trigger установлен в On.
Сохранение
развернуть все
S — Вращение вала барабана
вращательное механическое устройство
Вращательный порт сохранения сопоставлен с вращающимся валом барабана.
H — Тепловой поток
тепловой
Тепловой порт сохранения сопоставлен с тепловым потоком.
Зависимости
Этот порт отображается только, когда в настройках Friction параметр Thermal Port устанавливается на Model.
Осушение этого порта устанавливает связанные видимые настройки.
Параметры
развернуть все
Геометрия
Drum radius — Свяжитесь с поверхностным радиусом
150
mm (значение по умолчанию) | положительная скалярная величина
Радиус барабана связывается с поверхностью. Значение должно быть больше нуля.
Actuator location radius — Центр к расстоянию между центрами между барабаном и линией силы действия
100
mm (значение по умолчанию) | положительная скалярная величина
Расстояние между барабаном сосредотачивается и линия силы действия. Значение должно быть больше нуля.
Pin location radius — Центр к расстоянию между центрами между контактом стержня и барабаном
125
mm (значение по умолчанию) | положительная скалярная величина
Расстояние между контактом стержня и центрами барабана. Параметр должен быть больше нуля.
Pin location angle — Угловое расстояние от контакта стержня, чтобы тормозить ось симметрии
15
deg (значение по умолчанию) | неотрицательный скаляр
Угловая координата стержня прикрепляет местоположение от оси симметрии тормоза. Значение должно быть больше или быть равным нулю.
Shoe beginning angle — Угол между контактом hings и материалом трения
5 deg (значение по умолчанию) | положительная скалярная величина
Угол между контактом стержня и начало полотна материала трения обуви. Значение параметра должно быть в range0 ≤ θsb ≤ (π-pin угол местоположения).
Shoe span angle — Угол материала трения
120 deg (значение по умолчанию) | положительная скалярная величина
Угол между началом и концом полотна материала трения на обуви. Значение параметра должно быть в области значений 0 <θsb ≤ (π - углу местоположения контакта - угол начала обуви).
Трение
Viscous friction coefficient — Вязкое трение
.01
n*m/(rad/s) (значение по умолчанию) | nonnegatvie скаляр
Коэффициент вязкого трения в поверхности контакта. Значение должно быть больше или быть равным нулю.
Thermal port — Тепловая модель
Omit (значение по умолчанию) | Model
Модель для теплового потока и изменения температуры:
Зависимости
Когда этот параметр устанавливается на Model, тепловой порт H и связанные настройки отображаются.
Temperature — Температура
[280, 300, 320] K (значение по умолчанию) | увеличивающийся вектор
Массив температур раньше создавал 1D интерполяционную таблицу температурного КПД. Значения массивов должны увеличиться слева направо.
Зависимости
Этот параметр только отображается, когда параметр Thermal Port устанавливается на Model.
Contact friction coefficient — Трение Кулона
0.3 [0.1, 0.05, 0.03] (тепловое значение по умолчанию модели) | положительная скалярная величина или вектор
Коэффициент трения Кулона в барабане пояса связывается с поверхностью. Значение должно быть больше нуля. Для тепловой модели:
Число элементов в векторе должно совпасть с числом элементов в заданном векторе для параметра Temperature
Значения увеличиваются слева направо.
Каждое значение должно быть больше нуля.
Зависимости
Этот параметр задан как a:
Скаляр, когда Тепловой Параметр порта установлен в Omit.
Вектор, когда Тепловой Параметр порта установлен в Model.
Angular velocity threshold — Вращательная скорость требуется для почти установившегося трения контакта
0.01
rad/s (значение по умолчанию) | положительная скалярная величина
Скорость вращения, при которой коэффициент трения контакта практически достигает своего установившегося значения. Значение должно быть больше нуля.
Отказы
Enable faults — Опция отказа
Off (значение по умолчанию) | On
Включите внешне или временно инициированные отказы. Когда сбой произойдет, сила пояса тормоза, обычно полученная в порте F, будет установлена в значение, заданное в параметре Belt force when faulted.
Belt force when faulted — Установите давшую сбой силу пояса
0 N (значение по умолчанию) | положительная скалярная величина
Установите давшую сбой силу пояса. Когда сбой произойдет, сила пояса тормоза, обычно полученная в порте F, будет установлена в значение, заданное в параметре Belt force when faulted. Значение 0 подразумевает, что торможение не происходит. Относительно большое значение подразумевает, что тормоз застревает.
Зависимости
Чтобы включить этот параметр, установите Enable faults на On.
Enable external fault trigger — Внешняя триггерная опция
Off (значение по умолчанию) | On
Включает порт T. Физический сигнал в порте T, который больше 0.5 триггерный сбой.
Зависимости
Чтобы включить этот параметр, установите Enable faults на On.
Enable temporal fault trigger — Временная триггерная опция
Off (значение по умолчанию) | On
Включает инициирование отказа в требуемое время. Когда Simulation time for fault event будет достигнут, сила пояса тормоза, обычно полученная в порте F, будет установлена в значение, заданное в параметре Belt force when faulted.
Зависимости
Чтобы включить этот параметр, установите Enable faults на On.
Simulation time for fault event — Время, в которое инициирован сбой
5 s (значение по умолчанию) | положительная скалярная величина
Когда Simulation time for fault event будет достигнут, сила пояса тормоза, обычно полученная в порте F, будет установлена в значение, заданное в параметре Belt force when faulted.
Зависимости
Чтобы включить этот параметр, установите Enable faults на On и Enable temporal fault trigger к On.
Reporting when fault occurs — Отчет условия отказа
None (значение по умолчанию) | Warning | Error
Создание отчетов о настройке условию отказа. Когда создание отчетов установлено в Warning или Error, сообщение отображено в Средстве просмотра Диагностики Simulink. Когда Error выбран, симуляция остановится, если сбой произойдет.
Зависимости
Чтобы включить этот параметр, установите Enable faults на On.
Тепловой порт
Thermal mass — Сопротивление изменению температуры
50
kJ/K (значение по умолчанию) | скаляр
Тепловая энергия, требуемая изменить температуру компонента одной степенью. Чем больше количество тепла, тем более стойкий компонент к изменению температуры.
Зависимости
Этот параметр только отображается, когда в настройках Friction параметр Thermal Port устанавливается на Model.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Представленный в R2012b