Harmonic Drive
Редуктор скорости высокого отношения на основе эластичной деформации эллиптического механизма
Описание
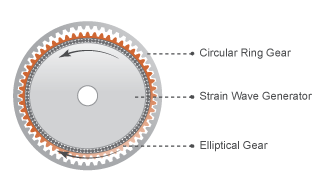
Этот блок представляет компактное, высокое отношение, механизм сокращения скорости, который содержит три ключевых компонента:
Генератор волны деформации включает эллиптический разъем, соединяемый к мчавшемуся шарикоподшипнику. Это находится в эластичном металлическом механизме, деформируя его в небольшой эллиптический шаблон. Вращение эллиптического шаблона в корпусе механизма составляет волну деформации.
Эллиптически деформированный механизм затрагивает внутренние зубы фиксированного кругового кольцевого механизма незначительно большего диаметра. Запутывающий происходит одновременно в двух удлиненных концах эллиптического механизма. Этот проект удваивает зубы в mesh, повышая способность крутящего момента системы приводов.
Во время нормального функционирования основной вал управляет генератором волны деформации. Эллиптический разъем вращается свободно в эластичном металлическом механизме, распространяя волну деформации об оси вращения механизма. Эта волна деформации заставляет эллиптические зубы механизма затрагивать внутренние зубы кругового кольцевого механизма прогрессивно.
Внутреннее запутывающее между этими двумя механизмами заставляет эллиптическую ось механизма вращаться в противоречии с эллиптической волной деформации. Для каждого по часовой стрелке вращение, которое генератор волны деформации завершает, эллиптическая ось механизма, вращается против часовой стрелки небольшим количеством.
Большие отношения сокращения являются результатом почти равных зубных чисел механизма. Эффективное отношение сокращения механизма:
где:
r является отношением сокращения механизма.
n C является зубным количеством кругового кольцевого механизма.
n E является зубным количеством деформируемого эллиптического механизма.
Дополнительные параметры вычисляют потери мощности из-за механизма запутывающее и вязкое трение. Блок Simple Gear обеспечивает основу этого блока. Для получения дополнительной информации смотрите Простой Механизм.
Тепловая модель
Можно смоделировать эффекты теплового потока и изменения температуры путем осушения дополнительного теплового порта. Чтобы осушить порт, во вкладке Meshing Losses, устанавливают параметр Friction model на Temperature-dependent efficiency.
Переменные
Используйте настройки Variables, чтобы установить приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
ЗависимостиПеременные настройки отсоединены только, когда в настройках Meshing Losses параметр Friction model устанавливается на Temperature-dependent efficiency.
Аппаратно-программное моделирование
Для оптимальной эффективности вашей симуляции в реальном времени, набор Friction model к No meshing losses - Suitable for HIL simulation на вкладке Meshing Losses.
Порты
Сохранение
развернуть все
B — Основной вал
вращательное механическое устройство
Сохранение вращательного порта, представляющего основной крутящий момент вала и скорость вращения.
F — Вал последователя
вращательное механическое устройство
Сохранение вращательного порта, представляющего крутящий момент вала последователя и скорость вращения.
H — Дополнительный порт теплопередачи
тепловой
Тепловой порт сохранения для теплового моделирования.
Зависимости
Чтобы включить этот порт, установите Friction model на также:
.
Параметры
развернуть все
Основной
Number of teeth on elliptical gear — Эллиптические зубы механизма
100
Общее количество зубов, высовывающихся исходящий от эллиптического периметра механизма. Этот номер должен быть немного меньшим, чем количество зубов на круговом кольцевом механизме. Отношение двух зубных чисел механизма задает относительные скорости вращения валов последователя и основы.
Number of teeth on circular gear — Круговые зубы механизма
102
Количество зубов, высовывающихся внутрь от кругового кольцевого периметра механизма. Этот номер должен быть немного больше, чем количество зубов на эллиптическом механизме. Отношение двух зубных чисел механизма задает относительные скорости вращения валов последователя и основы.
Поймать в сети потери
Friction model — Модель трения механизма
No meshing losses — Suitable for HIL simulation (значение по умолчанию) | Constant efficiency | Load-dependent efficiency | Temperature-dependent efficiency | Temperature and load-dependent efficiency
No meshing losses — Suitable for HIL simulation — Запутывающий механизм идеален.
Constant efficiency — Передача крутящего момента между червем и механизмом уменьшается трением.
Load-dependent efficiency — Уменьшайте передачу крутящего момента переменным коэффициентом полезного действия. Этот фактор падает в области значений 0 <η <1 и меняется в зависимости от загрузки крутящего момента.
Temperature-dependent efficiency — Уменьшайте передачу крутящего момента постоянным коэффициентом полезного действия, который зависит от температуры, но не рассматривает загрузку механизма. Этот фактор падает в области значений 0 <η ≤ 1 и независим от загрузки. Передача крутящего момента определяется из предоставленных пользователями данных для КПД механизма и температуры.
Temperature and load-dependent efficiency — Уменьшайте передачу крутящего момента переменным коэффициентом полезного действия, который зависит от температуры и загрузки. Этот фактор падает в области значений 0 <η <1 и меняется в зависимости от загрузки крутящего момента. КПД передачи крутящего момента определяется из предоставленных пользователями данных для загрузки механизма и температуры.
Efficiency — Закрутите КПД передачи
0.95
Закрутите КПД передачи (η) между валами последователя и основой. Этот параметр обратно пропорционален запутывающим потерям мощности.
Зависимости
Чтобы включить этот параметр, установите Friction model на Constant efficiency.
Follower power threshold — Значение, выше которого применяется полный коэффициент полезного действия
0.001
Абсолютное значение степени вала последователя, выше которой полный коэффициент полезного действия в действительности. Гиперболическая функция тангенса сглаживает коэффициент полезного действия от нуля когда в покое к полному значению КПД в пороге степени.
Как инструкция, порог степени должен быть ниже, чем ожидаемая степень, переданная в процессе моделирования. Более высокие значения могут заставить блок недооценивать потери КПД. Однако очень низкие значения могут повысить вычислительную стоимость симуляции.
Зависимости
Чтобы включить этот параметр, установите Friction model на Constant efficiency.
Input shaft torque at no load — Крутящий момент привода на неактивном вале
0.1
Крутящий момент привода (неактивный τ) действующий на входной вал в нерабочем режиме, e.g., когда передача крутящего момента в выходной вал равняется нулю. Для ненулевых значений входная мощность в нерабочем режиме полностью рассеивается из-за запутывающих потерь.
Зависимости
Чтобы включить этот параметр, установите Friction model на Load-dependent efficiency.
Nominal output torque — Значение крутящего момента, в котором нормирован КПД
5
Выведите крутящий момент (τ F), в котором можно нормировать зависимый загрузкой КПД.
Зависимости
Чтобы включить этот параметр, установите Friction model на Load-dependent efficiency.
Efficiency at nominal output torque — Передайте КПД
0.95
Закрутите КПД передачи (η) в номинальном выходном крутящем моменте. Большие значения КПД соответствуют большей передаче крутящего момента между валами ввода и вывода.
Зависимости
Чтобы включить этот параметр, установите Friction model на Load-dependent efficiency.
Follower angular velocity threshold — Значение, выше которого применяется полный коэффициент полезного действия
0.01
Абсолютное значение угловой скорости вала последователя, выше которой полный коэффициент полезного действия в действительности (ω F). Ниже этого значения гиперболическая функция тангенса сглаживает коэффициент полезного действия одному, понижая потери КПД, чтобы обнулить когда в покое.
Как инструкция, порог скорости вращения должен быть ниже, чем ожидаемая скорость вращения в процессе моделирования. Более высокие значения могут заставить блок недооценивать потери КПД. Однако очень низкие значения могут повысить вычислительную стоимость симуляции.
Зависимости
Чтобы включить этот параметр, установите Friction model на Load-dependent efficiency.
Temperature — Массив для табличной параметризации КПД
[280 300 320]
Массив температур раньше создавал интерполяционную таблицу КПД. Значения массивов должны увеличиться слева направо. Температурный массив должен быть одного размера с массивом КПД в температурно-зависимых моделях. Массив должен быть одного размера с массивом Efficiency.
Зависимости
Чтобы включить этот параметр, установите Friction model на также:
Efficiency — Массив КПД механизма
[0.95 0.9 0.85]
Массив КПД раньше создавал 1D интерполяционную таблицу температурного КПД для температурно-зависимых моделей КПД. Элементы массива являются КПД при температурах в массиве Temperature. Эти два массива должны быть одного размера.
Зависимости
Чтобы включить этот параметр, установите Friction model на также:
Follower power threshold — Степень, ниже которой применяется числовое сглаживание
0.001
Абсолютное значение степени вала последователя, выше которой полный коэффициент полезного действия в действительности. Гиперболическая функция тангенса сглаживает коэффициент полезного действия между нулем когда в покое и значением, введенным интерполяционной таблицей температурного КПД когда в пороге степени.
Зависимости
Чтобы включить этот параметр, установите Friction model на Temperature-dependent efficiency.
Load at elliptical gear — Эллиптический механизм загружает для табличной параметризации КПД
[1 5 10]
Массив загрузок эллиптического механизма раньше создавал 2D интерполяционную таблицу температурного КПД загрузки для температуры и загружал зависимые модели КПД. Значения массивов должны увеличиться слева направо. Массив загрузки должен быть одного размера с отдельным столбцом матрицы КПД.
Зависимости
Чтобы включить этот параметр, установите Friction model на Temperature and load-dependent efficiency.
Efficiency matrix — Массив КПД для табличной параметризации КПД
[ 0.85 0.8 0.75; 0.95 0.9 0.85; 0.85 0.8 0.7 ]
Матрица КПД компонента раньше создавала 2D интерполяционную таблицу температурного КПД загрузки. Элементы матрицы являются КПД при температурах в массиве Temperature и при загрузках в массиве Load at elliptical gear.
Количество строк должно совпасть с числом элементов в массиве Temperature. Количество столбцов должно совпасть с числом элементов в массиве Load at elliptical gear.
Зависимости
Чтобы включить этот параметр, установите Friction model на Temperature and load-dependent efficiency.
Follower angular velocity threshold — Скорость вращения, ниже которой применяется числовое сглаживание
0.01
Абсолютное значение угловой скорости вала последователя, выше которой полный коэффициент полезного действия в действительности. Ниже этого значения гиперболическая функция тангенса сглаживает коэффициент полезного действия одному, понижая потери КПД, чтобы обнулить когда в покое.
Зависимости
Чтобы включить этот параметр, установите Friction model на Temperature and load-dependent efficiency.
Вязкие потери
Viscous friction coefficients at base (B) and follower (F) — Жидкие динамические коэффициенты трения
[0 0]
N*m/(rad/s) (значение по умолчанию) | положительный двухэлементный вектор
Двухэлементный массив с коэффициентами вязкого трения в действительности в основе и валах последователя. Массив по умолчанию соответствует нулевым вязким потерям.
Тепловой порт
Thermal mass — Количество тепла
50
Тепловая энергия, требуемая изменить температуру компонента одной степенью. Чем больше количество тепла, тем более стойкий компонент к изменению температуры.
Initial temperature — Начальная температура
300
Температура компонента в начале симуляции. Начальная температура изменяет КПД компонента согласно вектору КПД, который вы задаете, влияя на запутывающий запуск или потери на трение.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Смотрите также
Блоки Simscape
Введенный в R2014a