

Соединение с двумя вращательными степенями свободы между валами, ограниченными вращаться с равной скоростью
Соединения

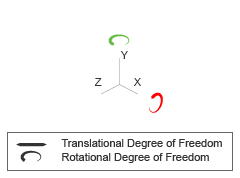
Этот блок представляет соединение двумя вращательными степенями свободы, ограниченными обеспечить постоянную угловую скорость приблизительно оси Z последователя и основа. Основа и системы координат последователя остаются совпадающими в течение симуляции.
Соединение применяет три преобразования вращения между базой и последующей системой координат в азимуте последовательности → угол поворота → - азимут. Каждое преобразование происходит относительно промежуточной системы координат, следующей из любых предшествующих преобразований. Например, угловое преобразование поворота происходит относительно промежуточной системы координат, следующей из преобразования азимута.
Объединенные степени свободы
Набор дополнительного состояния предназначается для блока руководства для объединенного примитива. Цели включают положение и скорость. Приоритетный уровень устанавливает относительную важность целей состояния. Если две цели несовместимы, приоритетный уровень определяет который из целей, чтобы удовлетворить.
Дополнительные порты обнаружения выводят объединенное примитивное движение через физические сигналы. Переменные движения, которые можно обнаружить, включают объединенное положение, скорость и ускорение. Выбор переменной в меню Sensing осушает порт физического сигнала для той переменной.
Желаемое объединенное примитивное положение в начале симуляции. Это - относительное угловое положение системы координат последователя относительно базовой системы координат. Выбирание этой опции отсоединяет поля приоритета и значения.
Желаемая объединенная скорость в начале симуляции. Это - относительная скорость вращения системы координат последователя относительно базовой системы координат. Выбирание этой опции отсоединяет поля приоритета и значения.
Выберите целевой приоритет состояния. Это - уровень важности, присвоенный цели состояния. Если всем целям состояния нельзя одновременно удовлетворить, приоритетный уровень определяет, каким целям удовлетворить сначала и как тесно удовлетворить им. Эта опция применяется и к целям состояния положения и скорости.
| Приоритетный уровень | Описание |
|---|---|
High (desired) | Удовлетворите цели состояния точно |
Low (approximate) | Удовлетворите цели состояния приблизительно |
Примечание
Во время сборки высокоприоритетные цели ведут себя как точные руководства. Низкоприоритетные цели ведут себя как грубые руководства.
Соедините примитивные углы, чтобы задать. Углы включают углы азимута и поворот.
Value: Bend AngleУгол между основой и последователем структурирует оси Z. Блок применяет этот угол о вращаемой оси Y, следующей из преобразования азимута. Под нулевым углом поворота ось Z системы координат последователя является совпадающей с осью Z базовой системы координат.
Value: AzimuthУгол об оси Z базовой системы координат до изгиба. В нулевом азимуте основа и оси Z последователя находятся в плоскости XZ базовой системы координат.
Выберите переменные, чтобы распознаться в постоянном скоростном примитивном соединении. Выбор переменной осушает порт физического сигнала, который выводит измеренное количество как функцию времени. Каждая величина измеряется для системы координат последователя относительно базовой системы координат. Это разрешено в базовой системе координат.
| Переменная | Описание |
|---|---|
Bend Angle: Position | Угол между основой и последователем структурирует оси Z |
Bend Angle: Velocity | В первый раз производная угла поворота. |
Bend Angle: Acceleration | Производная второго раза угла поворота. |
Azimuth: Position | Угол об оси Z базовой системы координат до изгиба. |
Azimuth: Velocity | В первый раз производная угла азимута. |
Azimuth: Acceleration | Производная второго раза угла азимута. |
Задайте режим соединения. Объединенный режим может быть нормален или разъединен в течение симуляции, или можно обеспечить входной сигнал, чтобы изменить режим во время симуляции.
Выберите одну из следующих опций, чтобы задать режим соединения. Настройкой по умолчанию является Normal.
| Метод | Описание |
|---|---|
Normal | Соединение обычно ведет себя в течение симуляции. |
Disengaged | Соединение расцеплено в течение симуляции. |
Provided by Input | Эта опция осушает порт mode, который можно соединить с входным сигналом, чтобы изменить объединенный режим во время симуляции. Объединенный режим нормален, когда входным сигналом является 0 и расцепленный, когда входным сигналом является -1. Объединенный режим может изменяться много раз во время симуляции. |
Выберите составные силы и крутящие моменты, чтобы распознаться. Их измерения охватывают все объединенные примитивы и не характерны ни для одного. Они прибывают в два вида: ограничение и общее количество.
Ограничительные измерения дают сопротивление против движения на заблокированных осях соединения. В призматических соединениях, например, которые запрещают перевод на xy плоскости, то сопротивление балансирует все возмущения в направлениях X и Y. Общие измерения дают сумму по всем силам, и закручивает из-за входных параметров приведения в действие, внутренние пружины и демпферы, объединенные пределы положения и кинематические ограничения, которые ограничивают степени свободы соединения.
Вектор, чтобы распознаться от пары реакции действия между базой и последующей системой координат. Пара является результатом третьего закона Ньютона движения, которое, для блока соединений, требует, чтобы сила или крутящий момент на системе координат последователя сопровождали равную и противоположную силу или крутящий момент на базовой системе координат. Укажите, распознаться ли, который проявленный базовой системой координат на системе координат последователя или проявленный последователем структурирует на базовой системе координат.
Структурируйте, на котором можно разрешить векторные компоненты измерения. Системы координат с различными ориентациями дают различные векторные компоненты для того же измерения. Укажите, получить ли те компоненты от осей базовой системы координат или от осей системы координат последователя. Выбор имеет значение только в соединениях с вращательными степенями свободы.
Динамическая переменная, чтобы измериться. Ограничение обеспечивает встречный перевод на заблокированных осях соединения при разрешении его на свободных осях его примитивов. Выберите, чтобы вывести ограничительный вектор силы через порт fc.
Динамическая переменная, чтобы измериться. Ограничение закручивает встречное вращение на заблокированных осях соединения при разрешении его на свободных осях его примитивов. Выберите, чтобы вывести ограничительный вектор крутящего момента через порт tc.
Динамическая переменная, чтобы измериться. Общая сила является суммой через все объединенные примитивы по всем источникам — входные параметры приведения в действие, внутренние пружины и демпферы, объединенные пределы положения и кинематические ограничения. Выберите, чтобы вывести общий вектор силы через порт ft.
Динамическая переменная, чтобы измериться. Общий крутящий момент является суммой через все объединенные примитивы по всем источникам — входные параметры приведения в действие, внутренние пружины и демпферы, объединенные пределы положения и кинематические ограничения. Выберите, чтобы вывести общий вектор крутящего момента через порт tt.
Этот блок имеет два порта системы координат. Это также имеет дополнительные порты физического сигнала для обнаружения динамических переменных, таких как силы, крутящие моменты и движение. Вы осушаете дополнительный порт путем установки распознающегося флажка, соответствующего тому порту.
B Базовая система координат
F Система координат последователя
Постоянная скорость соединяется примитивный, обеспечивает следующие порты обнаружения:
qb — Изогните угол
wb — Первая производная времени угла поворота
bb — Производная второго раза угла поворота
обеспечение качества — угол Азимута
wa — Первая производная времени угла азимута
ba — Производная второго раза угла азимута
Следующие порты обнаружения предоставляют составным силам и крутящим моментам, действующим на соединение:
фК Ограничительная сила
tc — Ограничительный крутящий момент
ft — Общая сила
tt — Общий крутящий момент
Настройка режима обеспечивает следующий порт:
режим — Значение режима соединения. Если вход равен 0, соединение обычно ведет себя. Если вход равен -1, соединение ведет себя, как расцеплено.