Кинематическое ограничение между червячным и зубчатым телами с перпендикулярными непересекающимися осями вращения
Simscape / Мультитело / Механизмы и Связи / Механизмы

Блок Worm and Gear Constraint представляет кинематическое ограничение между червем и зубчатыми телами, сохраненными под прямым углом. Порт базовой системы координат идентифицирует систему координат связи на черве, и порт системы координат последователя идентифицирует систему координат связи на механизме. Оси вращения совпадают с системой координат связи z - оси. Червь и механизм вращаются в фиксированном скоростном отношении, определенном радиусами подачи механизма или отношением зубного потока.
Направление потока червя может следовать или правым или левым соглашениям. Используемое соглашение определяет относительные направления червя и механизма вращательные скорости. Правое соглашение заставляет червя и механизм вращаться в том же направлении о соответствующих осях z. Левое соглашение заставляет червя и механизм вращаться в противоположных направлениях вместо этого.
Блок представляет только кинематическую ограничительную характеристику системе червя-и-механизма. Инерция механизма и геометрия являются твердыми свойствами, что необходимо задать блоки тела использования. Ограничительная модель механизма идеальна. Обратная реакция и потери механизма из-за кулонового и вязкого трения между зубами проигнорированы. Можно, однако, смоделировать вязкое трение в соединениях путем определения коэффициентов демпфирования в блоках соединений.
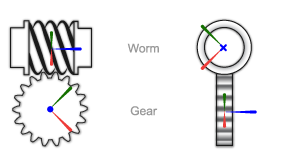
Ограничение реечного механизма параметрируется в терминах размерностей червя и кругов подачи механизма. Круги подачи являются мнимыми кругами, концентрическими с червем и зубчатыми телами и касательной к контактной точке потока. Радиусы подачи, пометил RB и RF на рисунке, радиусы, которые имели бы червь и механизм, если бы они уменьшались до цилиндров трения во взаимном контакте.

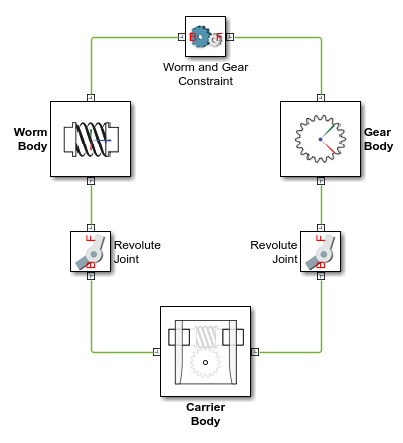
Ограничения механизма происходят в закрытых кинематических замкнутых цепях. Рисунок показывает топологию с обратной связью простой модели червя-и-механизма. Блоки соединений соединяют червя и зубчатые тела к общему фиксатору или поставщику услуг, задавая максимальные степени свободы между ними. Блок Worm and Gear Constraint соединяет червя и зубчатые тела, устраняя одну степень свободы и эффективно связывая движения механизма и червь.
Блок вводит специальные ограничения для относительных положений и ориентаций систем координат связи механизма. Ограничения гарантируют, что механизмы собираются только на расстояниях и углах, подходящих для того, чтобы сцепиться. Блок осуществляет ограничения во время сборки блока, когда это сначала пытается поместить механизмы в mesh, но использует остаток от модели, чтобы сохранить механизмы в mesh в процессе моделирования.
Ограничения положения
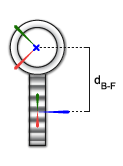
Расстояние между основой и последователем структурирует z - оси, обозначенный дБ-F на рисунке, должны быть равны расстоянию между центрами механизма.
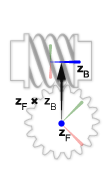
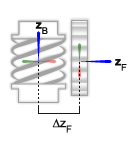
Поступательное перемещение между основой и системами координат последователя вдоль z системы координат последователя - ось, обозначил ΔZF на рисунке, должен быть нуль.
Ограничения ориентации
z - оси базы и последующей системы координат должны быть перпендикулярны друг другу. z - оси отображают синим на рисунке.
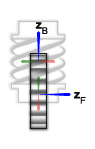
Векторное произведение последователя структурирует z - ось с базовой системой координат z - ось должна быть вектором, нацеленным от системы координат последователя до базовой системы координат z - ось. z - оси и их вектор векторного произведения показаны на рисунке. Векторное произведение задано как .