

Можно обнаружить пространственные отношения между двумя системами. Когда вы делаете так, Simscape™ Multibody™ разрешает измерение в системе координат измерения. Для большинства блоков соединений система координат измерения является базовой системой координат. Однако, если вы используете или Transform Sensor или блок соединений со сферическим примитивом, можно выбрать различную систему координат измерения. Системы координат измерения, которые можно выбрать, включают Base, Follower, и World. Блок Transform Sensor добавляет выбор между вращением и невращением версий базы и последующей системы координат.
Система координат измерения задает оси что использование Simscape Multibody, чтобы разрешить измерение. Измерение все еще описывает отношение между базой и последующей системой координат. Однако эти X, Y, и компоненты Z того измерения относятся к осям системы координат измерения. Simscape Multibody проводит измерения и проектирует его на оси системы координат измерения, которую вы выбираете. Фигура иллюстрирует концепцию системы координат измерения.
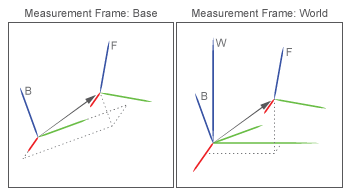
Стрела, соединяющая основу и системы координат последователя, является вектором сдвига. Если вы выбираете базовую систему координат как систему координат измерения, Simscape Multibody разрешает что вектор сдвига вдоль осей базовой системы координат. Если вы выбираете лабораторную систему координат как систему координат измерения, Simscape Multibody вместо этого разрешает вектор сдвига вдоль осей лабораторной системы координат. Вектор сдвига остается то же самое, но Simscape Multibody системы координат описывает то измерение в изменениях.
Обратите внимание на то, что можно выбрать систему координат измерения только с определенными блоками. Среди блоков соединений, только те со сферическим примитивным предложением выбор систем координат измерения. Все другие блоки соединений разрешают свои измерения в базовой системе координат. Блок Transform Sensor предлагает большую часть широкого выбора систем координат измерения.
Simscape Multibody предлагает пять различных систем координат измерения. Они включают Мир, а также вращающиеся и невращающиеся версии базы и последующей системы координат. Таблица описывает эти системы координат измерения.
| Система координат измерения | Описание |
|---|---|
| Мир | Инерционная система координат при абсолютном отдыхе. Мир является конечной системой отсчета в модели. Блок World Frame идентифицирует эту систему координат в модели. |
| Основа | Структурируйте, который соединяется с портом B распознающегося блока. Если вы твердо не соединяете его с Миром, Основа является обычно неинерционной. |
| Последователь | Структурируйте, который соединяется с портом F распознающегося блока. Если вы твердо не соединяете его с Миром, Последователь является обычно неинерционным. |
| Невращение Основы/Последователя | Невращение версий Базы и последующей системы координат. Не вращающаяся система координат является виртуальной системой координат, которую в каждом моменте времени Simscape Multibody содержит совпадающий с вращающейся системой координат, но которая имеет нулевую скорость вращения относительно лабораторной системы координат. Измерения, которые могут отличаться между вращением и невращением систем координат, являются линейной скоростью и линейным ускорением. |