Тела являются базовыми компонентами модели мультитела. Они - твердые компоненты, которые вы соединяете при сборке модели и предметов, на которые в конечном счете действуют все силы и крутящие моменты в той модели. Планеты и солнце служат телами в модели солнечной системы, например, и крылья делают также в модели колеблющегося механизма.
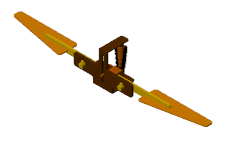
Колеблющийся механизм как блок тел

Если вы знакомы с моделированием CAD, можно свободно думать о телах как об эквивалентах частей CAD, каждый модульный компонент с геометрией и материалом. Подход моделирования может отличаться — например, нет никаких эскизов, чтобы чертить — но, концептуально, конечный результат является тем же самым: что-то, что можно соединить, ограничивает, реагирует и визуализирует.
Тело (обычно твердо) набор более простых элементов тела: твердые частицы с геометрией и инерцией и, менее часто, простая инерция (без присвоенных конфигураций) и простых конфигураций (без связанной инерции). Элементы тела, которые вы моделируете и пути, которыми вы соединяете их, определяют полные атрибуты тела.
Тела с простыми формами часто требуют одного тела. Те с комплексными формами или инерцией могут потребовать нескольких твердых частиц и случайной простой инерции или простой геометрии. Как кирпичи в модульном наборе сборки, свойства различных элементов тела могут отличаться друг от друга. Вам решать, чтобы объединить их способом, который производит желаемое тело.
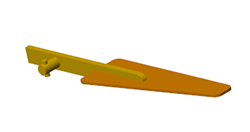
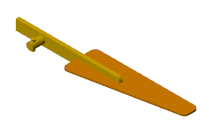
Тело крыла как набор твердых частиц
Каждый элемент тела включает одну или несколько систем координат и набор материальных атрибутов. Системы координат определяют размещение элементов тела друг относительно друга и обеспечивают точки крепления для соединений и ограничений. Атрибуты включают динамическое поведение элементов тела и в тех с геометрией, справка определяют их общий вид.
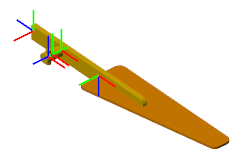
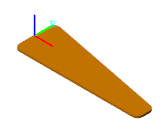
Системы координат на теле крыла
Атрибуты твердых частиц включают инерцию и цвет. Геометрия включает автоматическое вычисление параметров инерции и, в сочетании с цветом, визуализацией. Инерция определяет количество сопротивления изменениям в движении и факторе в вычисление сил и крутящие моменты, необходимые для ускорения.
Атрибуты других элементов тела более ограничены в осциллографе. Те из простой инерции включают только инерцию параметрами, которые в общем случае охватывают массу, центр массы, моменты инерции и продукты инерции.
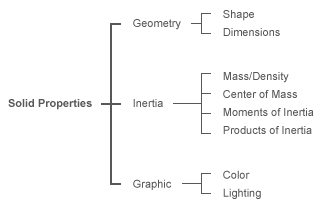
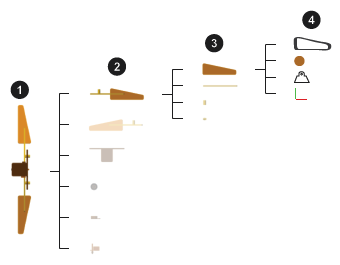
Фигура обобщает структуру типичного тела (здесь крыло) в контексте типичной модели мультитела (здесь колеблющийся механизм крыла). Блоки мультитела (1) включают тела (2), тела включают элементы тела (3) — часто, все твердые частицы — и элементы тела включают системы координат, и любой материал приписывает относящийся к ним (4).
Можно смоделировать большинство тел с помощью твердых блоков и блока Rigid Transform. Твердые блоки представляют своего тезку — твердый элемент определенного типа. Параметры блоков устанавливают атрибуты тела и порта системы координат, пометил R, обеспечивает систему координат для связи с моделью. Можно создать дополнительный, пользовательский, системы координат и расположить их использующий множество твердых функций.
Блок Rigid Transform представляет фиксированные пространственные отношения между двумя системами. Каждый раз, когда вы добавляете блок Rigid Transform в линию связи, вы заменяете отношение совпадения, первоначально установленное той линией с вращательным и поступательным смещением, которое вы задаете в диалоговом окне блока.
![]()
Только редко делайте тела содержат другие блоки. Те, которые остаются в библиотеке Body Elements — Graphic, Inertia, и всех в подбиблиотеке Variable Mass — служат особым случаям. Используйте их, например, чтобы добавить графические маркеры, настроить инерцию посредством соединения или позволить инерции варьироваться в процессе моделирования.
Можно визуализировать отдельные твердые частицы и завершить модели. Правильный инструмент визуализации, чтобы использовать зависит, на каком из двух вы хотите визуализировать. Можно визуализировать отдельные твердые частицы непосредственно через их соответствующие твердые блоки. В его диалоговом окне твердые блоки обеспечивают панель визуализации, которая показывает геометрию, системы координат и цвет тела, что это представляет. Визуализация работает, даже если блок-схема является неполной или недопустимой.
Типичная серьезная визуализация
Можно визуализировать модель и все тела в ней, с помощью утилиты визуализации Simscape Multibody, Mechanics Explorer. Модель должна быть свободной от кинематических конфликтов, такой как те из-за взаимно несовместимых соединений и ограничений. Это должно также содержать один блок Solver Configuration для каждой топологически отличной сети мультитела — каждый группа блоков Simscape Multibody, которые соединяются без перерывов в их линиях связи.
Mechanics Explorer открывает статическую визуализацию модели в своей начальной настройке каждый раз, когда вы делаете обновление схемы (во вкладке Debug, нажмите Update Model). Начальная настройка является итоговым результатом всех начальных объединенных положений и углов, значения которых можно задать положения шарниров использования. Визуализация становится динамической, когда вы запускаете симуляцию, несмотря на то, что это - задача, вы вряд ли выполните при тихом моделировании тел.
Типичная визуализация модели
Для получения дополнительной информации о визуализации, смотрите, Визуализируют Модель и Ее Компоненты.
В командной строке MATLAB введите sm_cam_flapping_wing. Модель колеблющегося механизма крыла открывается. Посмотрите в маске блока подсистемы, названного RightWing. Можно сделать это путем нажатия на стрелку вниз в левом нижнем углу блока. Блоки в подсистеме являются типичным представлением тела.
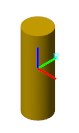
Тело блокируется, каждый представляет раздел тела крыла. Линии связи между твердыми блоками и блоками Rigid Transform, которые содержат некоторые линии связи, задают пространственные отношения, которые существуют между твердыми разделами. Откройте диалоговое окно блока Cylindrical Solid под названием CrossPin и исследуйте его атрибуты:
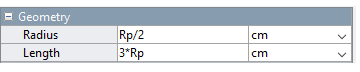
Параметры Geometry по умолчанию расширены. Блок Cylindrical Solid использует форму со своими соответствующими размерностями (Radius, Length) параметрированный в терминах переменных MATLAB (Rp, Lp). Все переменные заданы численно в маске подсистемы.

Расширьте параметры Inertia. Блок сконфигурирован, чтобы вычислить объем параметров инерции от геометрии и массового параметра (Density). Этот параметр также параметрируется в терминах переменной MATLAB (rho).

Расширьте параметры Graphic. Блок использует Simple цветовая модель с визуальными свойствами тела (Color, Opacity) параметрированный в терминах переменных MATLAB (lclr) или заданный численно (1.0).

В панели инструментов визуализации нажмите кнопку системы координат. Панель визуализации показывает системы координат, сопоставленные с телом. Это тело имеет одну систему координат, система координат локальной ссылки, которую по умолчанию имеет каждый твердый блок. Размещение этой системы координат относительно геометрии влияет на размещение геометрии в контексте модели.
Обновите блок-схему. Mechanics Explorer открывается статической визуализацией колеблющейся модели крыла в ее начальной настройке. В области просмотра в виде дерева (расположенный на левой стороне Mechanics Explorer), щелкните правой кнопкой по узлу RightWing и выберите Show Only This. Панель визуализации обновляется, чтобы показать только элементы тела, которые составляют выбранный компонент.
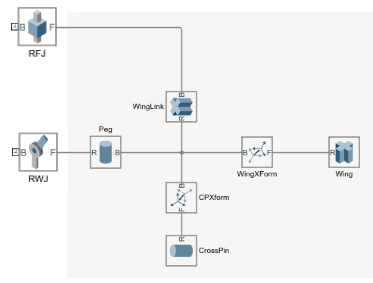
Линии прямой связи и блоки Rigid Transform объединяют элементы тела в одно тело. Такие связи обработаны как внутренние к телам, которым они принадлежат. Соединение и ограничительные блоки в свою очередь разделяют твердые частицы на различные тела. Эти блоки идентифицируют контуры тел, которые они соединяют. Это различие имеет практические последствия в моделях с блоками Gravitational Field.
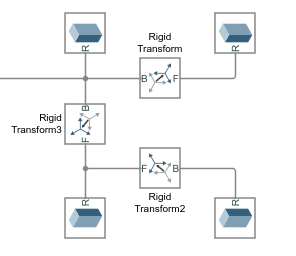
Рисунок показывает сглаженный фрагмент sm_cam_flapping_wing блок-схема. Блоки соединений namedRFJ и RWJ разделите блоки, которые составляют тело с правой стороны от них (идентифицированный заштрихованной областью) от соседних тел, до которых это соединяется (не показанный).
Проектом блок Gravitational Field порождает силу на центр массы тела. Центр массы определяется из агрегата всех блоков Элементов Тела, которые включают тело. Если два тела блокируют подключение через блок Rigid Transform, они принадлежат тому же телу. Одна гравитационная сила затем действует в центре массы того тела.
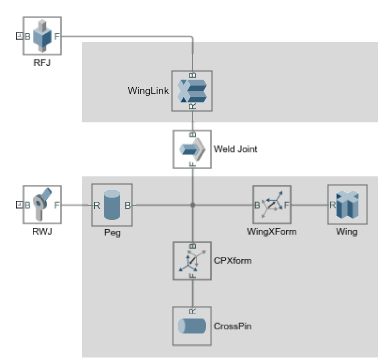
Если, однако, Cylindrical Solid блокирует подключение через блок Revolute Joint, они принадлежат отдельным телам. Две гравитационных силы затем применяются в отдельных центрах массы этих тел. То же самое верно, даже если вы заменяете блок Revolute Joint на блок Weld Joint. Независимо от его типа каждый блок соединений разделяет элементы тела, которые он соединяет в отдельные тела.
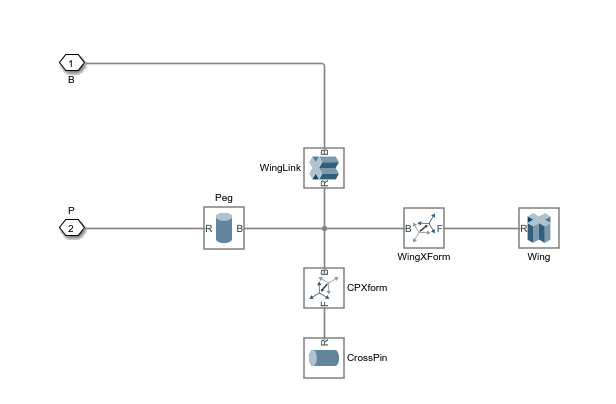
Рисунок показывает эффект добавления блока Weld Joint к сети блока, которая первоначально составила одно тело. Этот блок соединений делит тело на два тела, одно включение только блок Cylindrical Solid под названием WingLink, другое включение остающегося Cylindrical Solid и блоков Rigid Transform. блоки Gravitational Field в вашей модели, если таковые имеются, в этом случае породили бы силу в расчетном центре массы каждого тела.
Блоки, которые включают тело, соединяются жёстко и, в идеальном случае, последовательно. Результатом является древовидная структура, в которой путь между любыми двумя системами координат уникален. Технически возможно, однако, твердо соединить блоки так, чтобы они сформировали твердый цикл, закрытая структура, сформированная путем соединения открытых концов ветви или дерева.
Твердое преобразовывает цикл
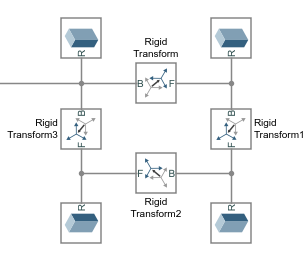
Твердый преобразовывают циклы, запрещены в модели. Они содержат избыточный (и ненужный) твердые связи, и они могли привести к предотвратимым числовым ошибкам, если включено в модель. Если ваша модель содержит твердую кинематическую замкнутую цепь, необходимо повредить тот цикл путем удаления его избыточных твердых связей. Рисунок показывает пример.
Это - установившаяся практика, чтобы заключить блоки, которые принадлежат телу в блоке Simulink Subsystem. Можно сохранить получившийся блок Subsystem в Библиотеке Simulink для дальнейшего использования в различных моделях. Маска блока Subsystem обеспечивает место, чтобы задать переменные и параметры, которые характерны для вложенных блоков — часто некоторой длины, плотности, и цвета — не создавая помехи рабочей области модели.
Можно смоделировать тело и преобразовать его в Подсистему Simulink в любое время до ее использования в модели мультитела. Например, при моделировании поршневого механизма, можно задержать, работают над поршневым телом, пока вы не готовы соединить поршень с корпусом механизма или с шатуном. Однако, учитывая, что форма и размер одного тела часто зависят от тех из другого, необходимо, по крайней мере, рассмотреть те атрибуты до фокусировки на блоке.
В командной строке MATLAB введите sm_cam_flapping_wing_lib. Библиотека Simulink открывается блоками подсистемы, представляющими два из тел, используемых в sm_cam_flapping_wing модель. Каждый из блоков имеет порты системы координат для связи с моделью.
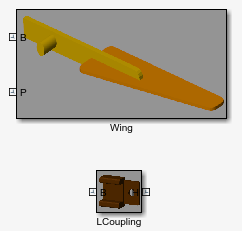
Дважды кликните блок подсистемы, названный Peg. Пользовательское диалоговое окно открывается основными параметрами, требуемыми полностью задавать это тело. Значения, заданные здесь, используются в Cylindrical Solid и блоках Rigid Transform, которые составляют блок подсистемы.
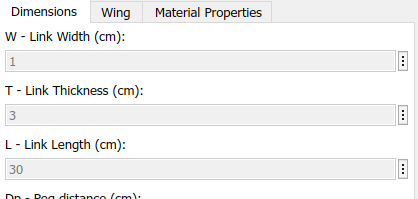
Щелкните правой кнопкой по блоку подсистемы и выберите Mask> View Mask. Редактор Маски Simulink открывается параметрами и кодом, относящимся к телу крыла. Параметры и переменные MATLAB, сопоставленные с ними, заданы во вкладке Parameters & Dialog. Код, используемый, чтобы сгенерировать крыло и профили формы штанги, задан во вкладке Initialization.
Щелкните правой кнопкой по блоку подсистемы и выберите Mask> Look Under Mask. Блок-схема, соответствующая этой подсистеме, открывается. Откройте диалоговые окна некоторых блоков и обратите внимание, что переменные MATLAB раньше задавали многие их параметры. Это переменные, заданные в маске подсистемы и заданные в диалоговом окне блока подсистемы.