Библиотека Electric Drives спроектирована для инженеров от многих дисциплин, которые хотят соединиться легко и точно электроприводы в симуляции их систем. Интерфейс представляет параметры выбранного дисковода в топологии системного взгляда, таким образом, упрощение пользователей корректировок может хотеть принести к значениям по умолчанию. Затем они могут беспрепятственно использовать любые другие тулбоксы или библиотеки, чтобы анализировать время или поведение частоты электропривода, взаимодействующего с его системой. Библиотека является самой полезной, когда мощный диск должен быть тщательно выведен, не игнорируя операционные пределы нагрузки на одну сторону и источника питания с другой стороны. Хорошим примером является система электропривода гибридного автомобиля, который может переключиться в миллисекунды от управления колесами к перезарядке батарей, когда тормоза заняты.
Инженеры и ученые могут работать с готовностью с библиотекой. Библиотека имеет семь типичных дисков постоянного тока (DC), используемых в отраслях промышленности и системах транспортировки, восемь дисков переменного тока (AC), обеспечивающих более эффективные и универсальные двигатели с тяги на позиционные устройства, и вал и модели редуктора скорости, полезные для соединения с двигателем модель загрузки, сделанной из блоков Simulink®. Добавленная стоимость библиотеки является параметрами, которые гарантируют валидность двигателя, конвертеров степени и системы управления. При разработке библиотеки особое внимание было уделено моделям электродвигателя путем сравнения поведения моделей с опубликованными данными крупных производителей. Многочисленные примеры или тематические исследования типичных дисков предоставляются библиотекой. Хотелось бы надеяться, системы типичного пользователя похожи на эти анализируемые системы, таким образом, экономя время в создании практической системы и предоставлении известной контрольной точки в анализе.
Чтобы получить доступ к библиотеке Electric Drives, откройте Энергосистемы Simscape™ Electrical™Specialized основная библиотека. В командной строке MATLAB®, введите:
simscapepowersystems_ST
Электропривод является системой, которая выполняет преобразование электроэнергии в механическую энергию на корректируемых скоростях. Это - причина, почему электропривод также называется корректируемым диском скорости (ASD). Кроме того, электропривод всегда содержит ток (или крутящий момент) регулирование, чтобы обеспечить безопасное текущее управление для двигателя. Поэтому крутящий момент/скорость электропривода может совпадать в устойчивом состоянии с характеристиками крутящего момента/скорости любой механической загрузки. Этот двигатель к механическому соответствию загрузки означает лучшую энергоэффективность и ведет, чтобы понизить затраты на энергию. Кроме того, во время переходного периода ускорения и замедления, электропривод обеспечивает быструю динамику и позволяет мягкие запуски и остановки, например.
Растущее число приложений требует, чтобы крутящий момент и скорость варьировались, чтобы совпадать с механической загрузкой. Электрические средние значения транспортировки, лифты, компьютерные дисководы, устройства и роботы являются примерами высокоэффективных приложений, где желаемое движение по сравнению с профилем времени должно быть прослежено очень точно. Насосы, вентиляторы, конвейеры и HVAC являются примерами умеренных производительных приложений, где операция переменной скорости означает энергосбережения.
Электропривод состоит из этих основных компонентов:
Электродвигатель
Степень электронный конвертер
Управляйте контроллером
Эта схема показывает базовую топологию электропривода.
Электропривод базовая топология
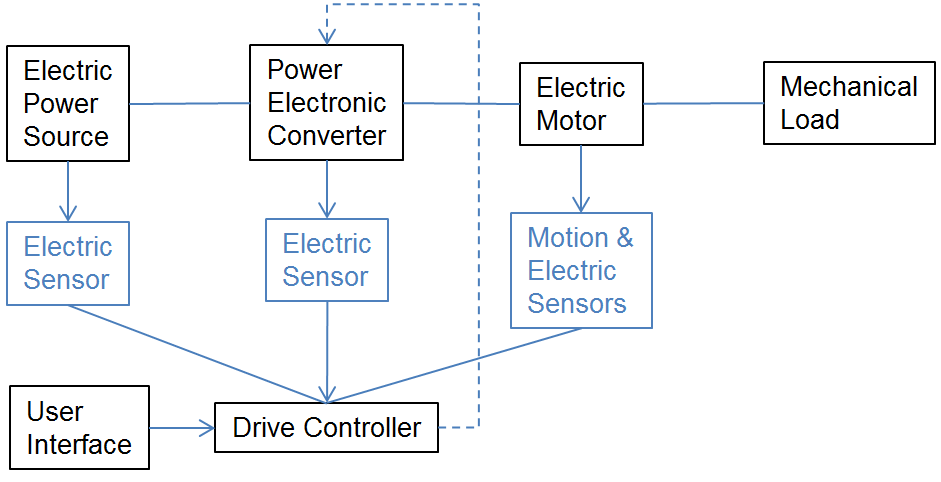
Двигатель, используемый в электроприводе, является или постоянным током (DC) или двигателем переменного тока (AC). Тип используемого двигателя задает классификацию электропривода в диски двигателя постоянного тока и диски электродвигателя переменного тока.
Степень электронный конвертер производит переменное напряжение переменного тока и частоту из источника электроэнергии. Существует много типов конвертеров в зависимости от типа электропривода. Диски двигателя постоянного тока основаны на управляемых выпрямителях фазы (конвертеры AC-DC) или на прерывателях (конвертеры DC-DC), в то время как электродвигатель переменного тока управляет инверторами использования (конвертеры DC-AC) или конвертеры трехколесного такси (конвертеры AC-AC). Основной компонент всей степени, электронные конвертеры являются электронным переключателем, которым или полууправляют (управляемый на состоянии), как в случае тиристора, или полностью управляемый (управляемый на состоянии и несостояния), как в случаях IGBT (биполярный транзистор изолированного затвора) и GTO (логический элемент выключают тиристор), блоки. Управляемая функция электронного переключателя - то, что позволяет конвертеру производить переменное напряжение переменного тока и частоту.
Цель контроллера диска состоит в том, чтобы преобразовать профиль крутящего момента/скорости необходимого диска в инициирование импульсов для электронного конвертера степени, принятие во внимание различных переменных диска (токи, скорость, и так далее) возвращенный датчиками. Чтобы выполнить это преобразование, контроллер базируется сначала на токе (или крутящий момент) регулятор. Текущий регулятор обязателен, потому что это защищает двигатель путем точного управления моторными токами. Сетбол (SP) этого регулятора может быть предоставлен внешне, если диск находится в режиме регулирования крутящего момента, или внутренне регулятором скорости, если диск находится в режиме регулирования скорости. В библиотеке Electric Drives регулятор скорости последовательно с текущим регулятором и основан на ПИ-контроллере, который имеет три важных функции:
Скорость изменения SP ограничивается так, чтобы желаемая скорость постепенно сползала к SP, во избежание внезапных ступенчатых изменений.
Регулятор скорости выход, который является SP для текущего регулятора, ограничивается максимальными и минимальными потолками.
Интегральный термин также ограничивается во избежание завершения. Следующий рисунок показывает блок-схему PI контроллер скорости на основе контроллеров.
PI регулятор скорости на основе контроллеров
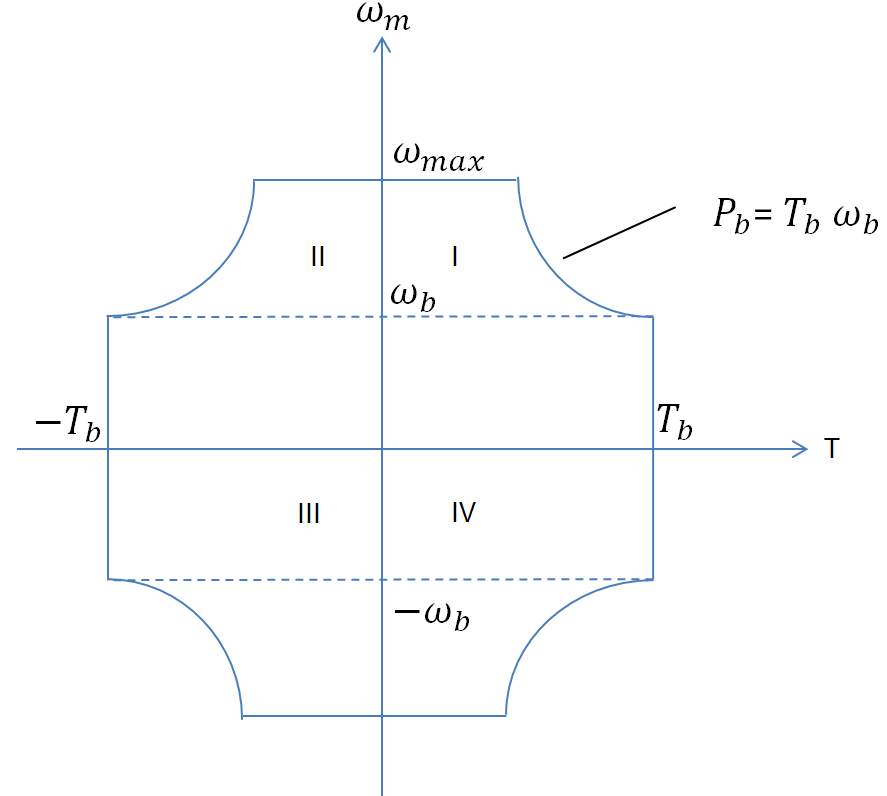
Для каждого приложения электропривода механическая загрузка, которая будет управляться, имеет определенный набор требований. Возможности крутящего момента/скорости электропривода могут быть представлены как скорость по сравнению с графиком крутящего момента, состоящим из четырех квадрантов. В первом квадранте электрический крутящий момент и знаки скорости оба положительны, указывая на прямую езду на автомобиле, поскольку электрический крутящий момент в направлении движения. Во втором квадранте электрический знак крутящего момента отрицателен, и знак скорости положителен, указывая на прямое торможение, поскольку электрический крутящий момент напротив направления движения. В третьем квадранте электрический крутящий момент и знаки скорости оба отрицательны, указывая на противоположную езду на автомобиле. В четвертом квадранте электрический знак крутящего момента положителен, и скорость отрицательна, указывая на противоположное торможение. Торможение диска обработано или тормозящим прерывателем (динамическое торможение) или двунаправленным потоком энергии (регенеративное торможение).
Эта схема иллюстрирует операционную область с четырьмя квадрантами электропривода. Каждый квадрант имеет постоянную область крутящего момента от 0 до +/-номинальная скорость ωb и область, где крутящий момент уменьшается обратно пропорционально со скоростью от ωb до максимальной скорости ωmax. Эта вторая область является постоянным энергетическим регионом и получена путем уменьшения моторного магнитного потока.
Работа с четырьмя квадрантами электропривода
Библиотека Electric Drives позволяет два уровня симуляции — подробные симуляции или симуляции среднего значения. Подробные симуляции используют Универсальный Мостовой брус, чтобы представлять подробное поведение выпрямителя - и управляемые инвертором диски. Этот уровень симуляции требует, чтобы маленькие шаги времени симуляции достигли правильного представления высокочастотных компонентов электрического сигнала дисков.
Симуляции среднего значения используют модели среднего значения конвертеров степени. При симуляции в режиме среднего значения электрические токи ввода и вывода и напряжения конвертеров степени, управляющих электрическими двигателями, представляют средние значения реальных токов и напряжений. Путем выполнения так, не представлены высокочастотные компоненты, и симуляции могут использовать намного большие временные шаги. Каждая модель среднего значения конвертера степени описана в документации для каждого DC или типа модели AC. Временной шаг, используемый в диске на уровне среднего значения, может обычно увеличиваться до самого маленького времени выборки контроллера, используемого в модели. Например, если диск использует 20 μs временных шагов для текущего цикла и 100 μs временных шагов для цикла скорости, то шаг времени симуляции в режиме среднего значения может быть увеличен до 20 μs. Инструкции по шагу времени симуляции даны в документации для каждой модели.
