Постоянный магнит синхронная машина, ориентированная на поле на управление
Simscape / Электрический / Управление / Управление PMSM

Блок PMSM Field-Oriented Control реализует ориентированную на поле управляющую структуру для постоянного магнита синхронной машины (PMSM). Поле ориентированное управление (FOC) является производительной стратегией управления электродвигателя переменного тока, которая разъединяет крутящий момент и поток путем преобразования стационарных токов фазы к вращающейся системе координат. Используйте FOC, когда скорость ротора и положение известны, и ваше приложение требует:
Высоко закрутите и низко текущий при запуске.
Высокая эффективность.
Структура FOC PMSM разъединяет крутящий момент и поток при помощи ротора d-q система координат. Эта схема показывает полную архитектуру блока.
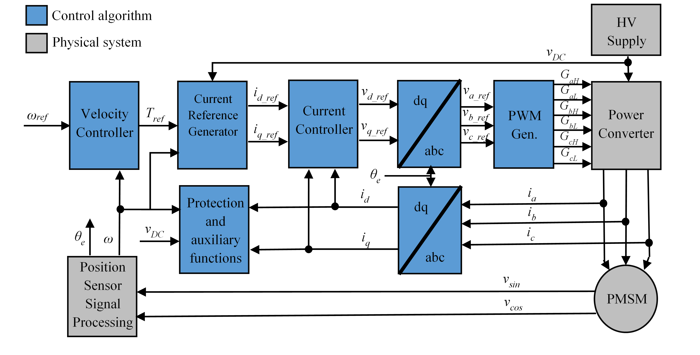
В схеме:
ω и ωref являются измеренными и ссылочными скоростями вращения, соответственно.
Tref является ссылочным электромагнитным крутящим моментом.
i и v являются токами статора и напряжениями и индексами, d и q представляют d-ось и q-ось и индексы a, b, и c, представляют три обмотки статора.
θe является ротором электрический угол.
G является импульсом логического элемента, индексы H и L, представляйте высоко и низко, и индексы a, b, и c представляет три обмотки статора.
Можно принять решение реализовать или скорость или управление крутящим моментом с Control mode параметр. Блок реализует скоростное управление, точно так же, как показано в схеме. Блок реализует управление крутящим моментом путем удаления блока Velocity Controller и принятия ссылочного крутящего момента непосредственно.
Параметры машины известны.
Управляющая структура реализована с одной частотой дискретизации.
[1] Bernardes, T., В. Ф. Монтэгнер, Х. А. Грюндлинг и Х. Пинейро. "Наблюдатель скользящего режима дискретного времени для sensorless векторного управления постоянного магнита синхронная машина". Транзакции IEEE на Industrial Electronics. Издание 61, Номер 4, 2014, стр 1679–1691.
[2] Carpiuc, S. и К. Лазарь. "Быстро ограниченное прогнозирующее текущее управление в реальном времени в постоянном магните синхронные основанные на машине автомобильные диски тяги". Транзакции IEEE на Электрификации Транспортировки. Vol.1, Номер 4, 2015, стр 326–335.
[3] Хак, M. E. Л. Чжун и М. Ф. Рахман. "Улучшенная траектория управляет для внутреннего постоянного магнита синхронным электроприводом с расширенным операционным пределом". Журнал Electrical & Electronics Engineering. Издание 22, Номер 1, 2003, p. 49.
[4] Ян, N., Г. Ло, В. Лю и К. Ван. "Внутренний постоянный магнит синхронный блок управления приводом для электромобиля с помощью интерполяционной таблицы". На 7-й Международной Конференции по Управлению Силовой электроникой и Движением. Издание 2, 2012, стр 1015–1019.
