Четыре или пятифазовая коммутируемая машина нежелания (SRM)
Simscape / Электрический / Электромеханический / Reluctance & Steppers
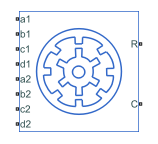
Блок Switched Reluctance Machine (Multi-Phase) представляет четыре - или пятифазовая коммутируемая машина нежелания (SRM).
Схема показывает моторную конструкцию для четырехфазовой машины.
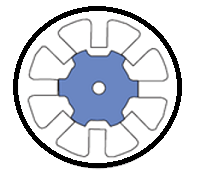
Схема показывает моторную конструкцию для пятифазовой машины.

Угол диапазона ротора для многофазной машины
где:
θst является топить углом.
Ns является количеством фаз.
Nr является количеством полюсов ротора.
Производственная возможность крутящего момента, β, одного полюса ротора
Математическая модель для коммутируемой машины нежелания (SRM) очень нелинейна из-за влияния магнитного насыщения на кривой потокосцепления к углу, λ (θph). Уравнение напряжения фазы для SRM
где:
vph является напряжением на фазу.
Rs является сопротивлением статора на фазу.
iph является током на фазу.
λph является потокосцеплением на фазу.
θph является углом на фазу.
Перезапись уравнения напряжения фазы в терминах частных производных дает к этому уравнению:
Переходная индуктивность задана как
или проще как
Противоэлектродвижущая сила задана как
Замена этими условиями в переписанное уравнение напряжения дает к этому уравнению напряжения:
Применение co-энергетической формулы к уравнениям для крутящего момента,
и энергия,
дает к интегральному уравнению, которое задает мгновенный крутящий момент на фазу, то есть,
Интеграция по фазам дает это уравнение, которое задает общий мгновенный крутящий момент как
Уравнение для движения
где:
J является инерцией ротора.
ω является скоростью вращательного механического устройства.
T является крутящим моментом ротора. Для блока Switched Reluctance Machine крутящий момент течет из случая машины (порт C сохранения блока) к ротору машины (порт R сохранения блока).
TL является крутящим моментом нагрузки.
J является инерцией ротора.
Bm является затуханием ротора.
Для высокочастотной разработки моделирования и управления используйте эмпирические данные и вычисление конечного элемента, чтобы определить кривую потокосцепления в терминах тока и угла, то есть,
Для моделирования низкого качества можно также аппроксимировать кривую с помощью аналитических методов. Один такой метод [2] использование эта показательная функция:
где:
λsat является влажным потокосцеплением.
f (θr) получен расширением Фурье.
Для расширения Фурье используйте первые два даже термины этого уравнения:
где a> b,
и
Нулевой угол ротора соответствует полюсу ротора, который выравнивается отлично с a - фаза, то есть, пиковый поток.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
[1] Boldea, я. и С. А. Насар. Электроприводы. 2-й Эд. Нью-Йорк: нажатие CRC, 2005.
[2] Iliĉ-Spong, M. R. Марино, С. Пересада и Д. Тейлор. “Управление линеаризацией обратной связи коммутируемых двигателей нежелания”. Транзакции IEEE на Автоматическом управлении. Издание 32, Номер 5, 1987, стр 371–379.
Switched Reluctance Machine | Synchronous Reluctance Machine



