Синхронная машина явно-полюсным ротором с основной или стандартной параметризацией
Simscape / Электрический / Электромеханический / Синхронный
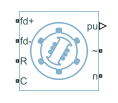
Блок Synchronous Machine Salient Pole моделирует существенно-полюсную синхронную машину с помощью основных или стандартных параметров.
Если блок находится в сети, которая совместима с разовым частотой режимом симуляции, можно выполнить анализ потоков загрузки сети. Анализ потоков загрузки вводит установившиеся значения, которые можно использовать, чтобы инициализировать машину.
Для получения дополнительной информации смотрите, Выполняют Анализ потоков загрузки Используя Simscape Electrical и Режим Симуляции Частоты и Времени. Для примера, который показывает, как инициализируют синхронную машину с помощью данных из анализа потоков загрузки, смотрите Синхронную Инициализацию Машины с Loadflow.
Синхронные уравнения машины описываются относительно вращающейся системы координат, заданной
где:
θe является электрическим углом.
N является количеством пар полюса.
θr является углом ротора.
Преобразование Парка сопоставляет синхронные уравнения машины с вращающейся системой координат относительно электрического угла. Преобразование Парка задано
Преобразование Парка используется, чтобы определить синхронные уравнения машины на модуль. Уравнения напряжения статора определены
и
где:
ed, eq и e0 является d - ось, q - ось и напряжения статора нулевой последовательности, заданные
va, vb и vc являются напряжениями статора, измеренными от порта ~ до нейтрального порта n.
ωbase является основной электрической скоростью на модуль.
ψd, ψq и ψ0 является d - ось, q - ось и потокосцепления статора нулевой последовательности.
ωr является скоростью вращения ротора на модуль.
Ra является сопротивлением статора.
id, iq и i0 является d - ось, q - ось и токи статора нулевой последовательности, заданные
ia, ib и ic являются токами статора, текущими из порта ~ к порту n.
Уравнения напряжения ротора определены
и
где:
efd является полевым напряжением.
e1d и e1q являются напряжениями через d - демпфером оси, вьющимся 1 и q - демпфер оси, вьющийся 1. Они равны 0.
ψfd, ψ1d и ψ1q являются магнитными потоками, соединяющими цепь возбуждения, d - демпфером оси, вьющимся 1, и q - демпфер оси, вьющийся 1.
Rfd, R1d и R1q являются сопротивлениями цепи возбуждения ротора, d - демпфером оси, вьющимся 1, и q - демпфер оси, вьющийся 1.
ifd, i1d и i1q являются токами, текущими в цепи возбуждения, d - демпфером оси, вьющимся 1, и q - демпфер оси, вьющийся 1.
Уравнения насыщения определены
(если насыщение отключено),
(если насыщение включено),
и
где:
ψad является d - воздушный зазор оси или взаимное потокосцепление.
ψaq является q - воздушный зазор оси или взаимное потокосцепление.
ψat является потокосцеплением воздушного зазора.
Ks является фактором насыщения.
Ladu является ненасыщенной взаимной индуктивностью статора d - ось.
Lad является взаимной индуктивностью статора d - ось.
Функция фактора насыщения, f, вычисляется от интерполяционной таблицы разомкнутой цепи на модуль как:
и
где:
Vag является напряжением воздушного зазора на модуль.
В относительных единицах,
и
может быть перестроен к
Уравнения потокосцепления статора определены
и
где:
Ll является индуктивностью утечки статора.
Lad и Laq являются взаимной индуктивностью статора d - осью и q - ось.
Уравнения потокосцепления ротора определены
и
где:
Lffd является самоиндукцией цепи возбуждения ротора.
L11d является самоиндукцией d - демпфер оси, вьющийся 1.
L11q является самоиндукцией q - демпфер оси, вьющийся 1.
Lf1d является roto цепью возбуждения и d - демпфер оси, проветривающий 1 взаимную индуктивность.
Индуктивность задана этими уравнениями:
Уравнения индуктивности принимают что взаимная индуктивность на модуль L12q = Laq, то есть, статор и токи ротора в q - ось вся ссылка один взаимный поток, представленный Laq.
Крутящий момент ротора задан
Можно выполнить графический вывод и отобразить действия с помощью меню Electrical в контекстном меню блока.
Щелкните правой кнопкой по блоку и, в меню Electrical, выберите одну из этих опций:
Display Base Values — Отображает значения машины в относительных единицах в Командном окне MATLAB®.
Display Associated Base Values — Отображения сопоставили базовые значения на модуль в командном окне MATLAB.
Display Associated Initial Conditions — Отображения сопоставили начальные условия в командном окне MATLAB.
Plot Open-Circuit Saturation (pu) — Напряжение воздушного зазора графиков, Vag, по сравнению с текущим полем, ifd, оба измерились в относительных единицах в графическом окне MATLAB. График содержит три трассировки:
Ненасыщенный — Stator d-axis mutual inductance (unsaturated), Ladu вы задаете
Насыщаемый — Per-unit open-circuit lookup table (Vag versus ifd) вы задаете
Выведенный — интерполяционная таблица Разомкнутой цепи (на модуль) вывела из the Per-unit open-circuit lookup table (Vag versus ifd), который вы задаете. Эти данные используются, чтобы вычислить фактор насыщения, Ks, по сравнению с магнитным потокосцеплением, ψat, характеристикой.
Plot Saturation Factor (pu) — Фактор насыщения графиков, Ks, по сравнению с магнитным потокосцеплением, ψat, оба измерились в относительных единицах в графическом окне MATLAB с помощью текущих параметров машины. Этот параметр выведен из других параметров, которые вы задаете:
Stator d-axis mutual inductance (unsaturated), Ladu
Per-unit field current saturation data, ifd
Per-unit air-gap voltage saturation data, Vag
Настройки Variables позволяют вам задавать приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
Для этого блока отображаются настройки Variables, только если в настройках Initial Conditions параметр Initialization option устанавливается на Set targets for rotor angle and Park's transform variables.
[1] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Лышевский, S. E. Электромеханические системы, электрические машины и прикладная механотроника. Бока-Ратон, FL: нажатие CRC, 1999.
Synchronous Machine Field Circuit | Synchronous Machine Measurement | Synchronous Machine Model 1.0 | Synchronous Machine Model 2.1 | Synchronous Machine Round Rotor



