Можно найти рабочие точки для моделей с компонентами Simscape™ с помощью программного обеспечения Simulink® Control Design™. В частности, можно найти установившиеся рабочие точки с помощью одного из следующих методов:
Основанная на оптимизации обрезка — Задает ограничения на входные параметры модели, выходные параметры или состояния, и вычисляет установившуюся рабочую точку, которая удовлетворяет этим ограничениям. Для получения дополнительной информации Вычислите Установившиеся Рабочие точки.
По умолчанию можно задать технические требования рабочей точки для любого Simulink и состояний Simscape в модели и любых портов ввода и вывода корневого уровня модели. Можно также задать дополнительные выходные технические требования на Сигналах Simulink. Чтобы применить выходные технические требования к физическому сигналу Simscape, сначала преобразуйте сигнал с помощью блока PS-Simulink Converter (Simscape).
Снимок состояния симуляции — начальные условия модели Specify около ожидаемой точки равновесия, и симулируют модель, пока это не достигает устойчивого состояния. Можно затем создать рабочую точку на основе установившихся сигналов и состояний в модели. Для получения дополнительной информации смотрите, Находят Рабочие точки в Снимках состояния Симуляции.
Чтобы привести лучше к обрезающим результатам для моделей Simscape, можно использовать основанные на проекции оптимизаторы для обрезки. Эти оптимизаторы осуществляют непротиворечивость начального условия модели при каждой оценке целевой функции или нелинейной ограничительной функции. Используя основанные на проекции оптимизаторы для обрезки требует программного обеспечения Optimization Toolbox™.
Можно использовать эти основанные на проекции оптимизаторы при обрезке моделей из командной строки и в Model Linearizer.
Чтобы задать тип оптимизатора в командной строке, создайте a findopOptions набор опции, и задает Optimizer опция как одно из следующего:
'lsqnonlin-proj' — Нелинейный метод наименьших квадратов с проекцией
'graddescent-proj' — Градиентный спуск с проекцией
При использовании градиентного спуска с проекцией в командной строке можно задать, осуществляет ли алгоритм начальные условия модели с помощью трудных или мягких ограничений путем определения ConstraintType опция в findopOptions.
Чтобы задать оптимизатор вводят:
Steady State Manager, откройте сначала Обрезку диалоговое окно модели. На вкладке Specification нажмите Trim Options. Затем откройте вкладку Options.
Model Linearizer, откройте сначала Обрезку диалоговое окно модели. На вкладке Linear Analysis, в Operating Point выпадающий список, выбирают Trim Model.
В диалоговом окне, в Optimization Method выпадающий список, выбирают оптимизатор.
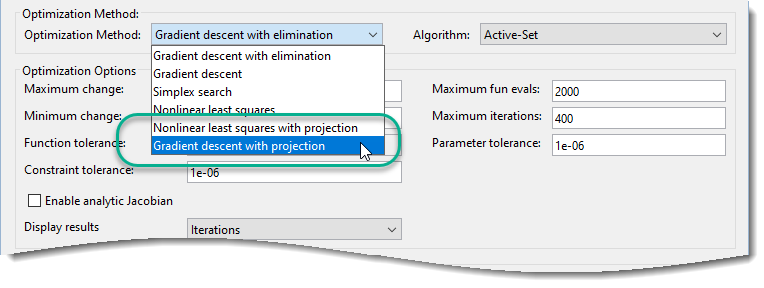
Когда вы используете градиентный спуск с проекцией в Steady State Manager или Model Linearizer, алгоритм осуществляет начальные условия модели с помощью трудных ограничений.
Для примера, который использует основанную на проекции оптимизацию для обрезки, смотрите Установившуюся Симуляцию с Основанным на проекции Оптимизатором Для обрезки.
