Frequency Response Based PID Tuner симулирует модель, чтобы оценить частотные характеристики объекта на нескольких частотах около пропускной способности управления. Это затем использует предполагаемую частотную характеристику, чтобы настроить усиления в вашем PID Controller. Этот тюнер является полезной альтернативой, когда PID Tuner не может линеаризовать объект в рабочей точке, вы хотите использовать для настройки.
Frequency Response Based PID Tuner может настроить P, I, D, и параметры N в PID Controller и блоки PID Controller (2DOF) и в непрерывное время и в дискретное время. Для блоков PID Controller (2DOF) тюнер не настраивает веса заданного значения b и c.
Как интерактивный PID Tuner, Frequency Response Based PID Tuner полагает, что объект все блоки в цикле между блоком PID Controller выход и вводит. Frequency Response Based PID Tuner выполняет эксперимент возмущения, чтобы оценить частотную характеристику разомкнутого контура объекта. Для этого тюнер выполняет следующие шаги:
Повреждает обратную связь в контроллере выход и симулирует модель, применяя сигналы возмущения к объекту. Возмущения включают синусоидальные сигналы в частоты [1/3,1,3,10] ωc , где ωc является целевой пропускной способностью, вы задаете для настройки. Если объект асимптотически устойчив, прикладной сигнал также включает возмущение шага.
Измеряется ответ на возмущение в контроллере ввел.
Использует получившиеся данные, чтобы оценить частотную характеристику объекта на этих четырех частотах. Для асимптотически устойчивых объектов тюнер также использует ответ на возмущение шага, чтобы оценить усиление DC объекта.
Использует предполагаемую частотную характеристику, чтобы вычислить коэффициенты ПИД, которые балансируют эффективность и робастность.
Если ваша модель включает воздействия, тюнер может запустить две симуляции: симуляция без возмущения, чтобы получить базовый ответ и симуляцию с возмущениями применилась к объекту. Тюнер затем использует различие между этими двумя ответами, чтобы удалить эффекты воздействий в модели. В этом случае предполагаемая частотная характеристика, используемая для настройки, основана на этом ответе без воздействия.
Чтобы открыть Frequency Response Based PID Tuner, в диалоговом окне блока PID Controller, в Select Tuning Method выпадающий список, выбирают Frequency Response Based.
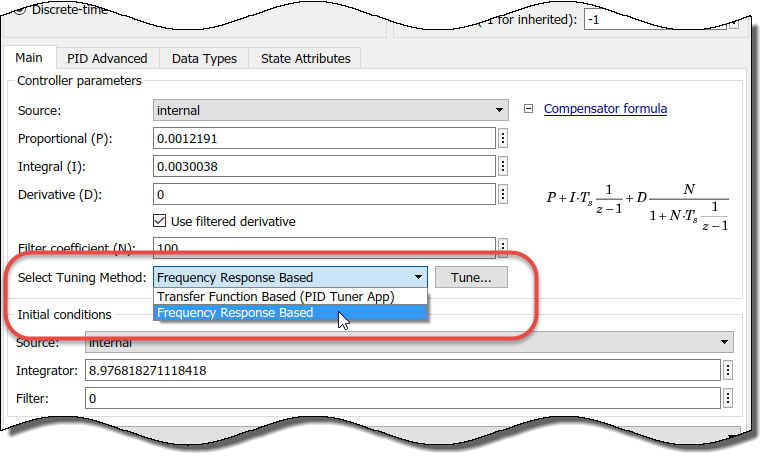
Нажмите Tune. Frequency Response Based PID Tuner открывается. Тюнер читает некоторые параметры из блока PID Controller. Эти параметры включают:
Тип контроллера (такой как PI, PD или ПИД)
Форма контроллера (параллель или идеал)
Область времени контроллера (непрерывное время или дискретное время)
Шаг расчета контроллера
В Frequency Response Based PID Tuner Вы конфигурируете настройки для эксперимента оценки и настраивающихся целей.
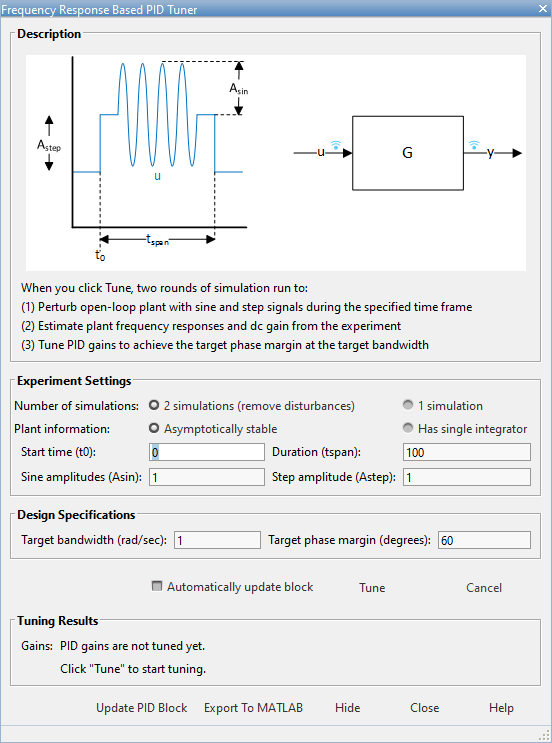
В разделе Experiment Settings вы задаете параметры, которые управляют экспериментом оценки частотной характеристики. Для получения дополнительной информации об этих настройках, нажмите Help.
Задайте, запустить ли две симуляции (значение по умолчанию) или один. Если ваша модель включает воздействия, которые могут влиять на результат эксперимента оценки частотной характеристики, выбрать 2 simulations (remove disturbances). С этой выбранной опцией тюнер запускает базовую симуляцию и вычитает получившуюся частотную характеристику из встревоженной симуляции, чтобы удалить эффекты воздействий. Если ваша модель не включает никакие подобные воздействия, пропустите базовую симуляцию путем выбора 1 simulation.
Задайте, устойчив ли объект асимптотически или имеет один интегратор. Если объект асимптотически устойчив, эксперимент оценки включает оценку усиления DC объекта. Frequency Response Based PID Tuner выполняет эту оценку путем введения сигнала шага в объект.
Внимание
Не используйте Frequency Response Based PID Tuner с нестабильным объектом или объектом, содержащим несколько интеграторов.
Задайте время начала эксперимента в поле Start time (t0). Запустите эксперимент, когда объект будет в желаемой рабочей точке равновесия. Например, если вы знаете, что ваша симуляция должна запуститься к 10 с для объекта, чтобы достигнуть такой рабочей точки, задайте время начала 10.
Задайте длительность эксперимента в поле Duration (tspan). Позвольте эксперименту, запускаемому достаточно долго для алгоритма оценки частотной характеристики, чтобы собрать достаточные данные для хорошей оценки на всех частотах, которые это зондирует. Осторожная оценка на время эксперимента является 100/ωc, где ωc является целевой пропускной способностью для настройки этого, вы задаете.
Задайте амплитуды возмущения. Во время настраивающегося эксперимента Frequency Response Based PID Tuner вводит синусоидальный сигнал в объект на четырех частотах, [1/3,1,3,10] ωc . Используйте поле Sine amplitudes (Asin), чтобы задать амплитуды этих введенных сигналов. Можно ввести скалярное значение, чтобы ввести ту же амплитуду на каждой частоте или вектор из длины 4, чтобы задать различные амплитуды для каждого.
На типичном объекте с типичной целевой пропускной способностью не значительно различаются величины ответов объекта на частотах эксперимента. В таких случаях можно использовать скалярное значение, чтобы применить то же возмущение величины на всех частотах. Однако, если вы знаете, что ответ затухает резко по частотному диапазону, рассмотрите уменьшение амплитуды входных параметров более низкой частоты и увеличения амплитуды входных параметров более высокой частоты. Для эксперимента оценки численно лучше, когда все ответы объекта имеют сопоставимые величины.
Амплитуды возмущения должны быть:
Достаточно большой, что возмущение преодолевает любую мертвую зону в приводе объекта и генерирует ответ выше уровня шума
Достаточно маленький, чтобы поддерживать объект в рабочем состоянии приблизительно в линейной области около номинальной рабочей точки и постараться не насыщать ввод или вывод объекта
В эксперименте синусоидальные сигналы накладываются (с возмущением шага, если таковые имеются, в случае настройки разомкнутого контура). Таким образом возмущение может быть, по крайней мере, столь же большим как сумма всех амплитуд. Поэтому, чтобы получить соответствующие значения для амплитуд, рассмотрите:
Пределы привода. Убедитесь, что крупнейшее возмущение в области значений вашего привода объекта. Насыщение привода может ввести ошибки в предполагаемую частотную характеристику.
Сколько ответ объекта изменяет в ответ на данный привод, введенный в номинальной рабочей точке для настройки. Например, предположите, что вы настраиваете ПИД-регулятор, используемый в управлении скорости вращения двигателя. Вы определили на частотах вокруг целевой пропускной способности, изменение на 1 ° в углу дросселя вызывает изменение приблизительно 200 об/мин в скорости вращения двигателя. Предположим далее, что, чтобы сохранить линейную эффективность скорость не должна отклоняться больше чем на 100 об/мин от номинальной рабочей точки. В этом случае выберите амплитуды, чтобы гарантировать, что сигнал возмущения не больше, чем 0,5 (принимающий, что значение в пределах привода).
Если ваш объект асимптотически устойчив, задайте амплитуду возмущения шага в поле Step amplitudes (Astep). Факторы для выбора амплитуды шага совпадают с факторами для определения амплитуд шага.
В разделе Design Specifications диалогового окна вы задаете свои цели по настройке ПИДа.
Задайте целевую пропускную способность в поле Target bandwidth (rad/sec). Целевая пропускная способность является целевым значением для частоты среза с 0 усилениями дБ настроенного ответа разомкнутого контура CP, где P является ответом объекта, и C является ответом контроллера. Эта частота среза примерно устанавливает пропускную способность управления. Для желаемого времени нарастания τ хорошее предположение для целевой пропускной способности является 2/τ.
В поле Target phase margin (degrees) задайте целевой минимальный запас по фазе для настроенного ответа разомкнутого контура в частоте среза. Целевой запас по фазе отражает желаемую робастность настроенной системы. Как правило, выберите значение в области значений приблизительно 45 °– 60 °. В общем случае более высокий запас по фазе улучшает перерегулирование, но может ограничить скорость ответа. Значение по умолчанию, 60 °, имеет тенденцию балансировать эффективность и робастность, давая приблизительно к 5-10%-му перерегулированию, в зависимости от характеристик вашего объекта.
Для получения дополнительной информации об этих настройках, нажмите Help.
Нажмите Tune, чтобы инициировать эксперимент оценки частотной характеристики. В то время как эксперимент оценки запускается, тюнер:
Закрывает открытый блок PID Controller.
Очищает любые предыдущие настраивающие результаты, отображенные в диалоговом окне тюнера.
Заменяет блок PID Controller в вашей модели с подсистемой без имени.
Примечание
Когда эксперимент оценки завершается или отменяется, тюнер восстанавливает блок PID Controller. Этот процесс может привести к некоторому смещению сигнальных проводов на холсте модели и помещает вашу модель Simulink® в состояние с несохраненными изменениями.
Когда эксперимент оценки заканчивается, тюнер вычисляет новые коэффициенты ПИД и отображает их в разделе Tuning Results диалогового окна. (Для получения дополнительной информации о настраивающихся результатах, нажмите Help.)
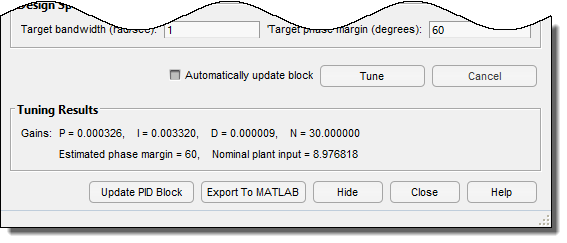
Если Automatically update block выбран, Frequency Response Based PID Tuner пишет новые коэффициенты ПИД в блок PID Controller, когда настройка завершается. В противном случае нажмите Update PID Block, чтобы записать настроенные усиления в блок. Симулируйте модель, чтобы подтвердить настроенные усиления против вашей полной нелинейной системы.
Для примера, иллюстрирующего использование Frequency Response Based PID Tuner, чтобы настроить блок PID Controller в модели Simulink, которая не линеаризует, смотрите, что ПИД-регулятор Проекта Использует Частотную характеристику Объекта Около Пропускной способности.
