

В этом примере показано, как настроить модель Simulink® системы управления, чтобы соответствовать заданной пропускной способности и заданным запасам устойчивости в Control System Tuner, явным образом не создавая настраивающиеся цели, которые получают эти требования. Можно использовать аналогичный подход для быстрой настройки цикла систем управления, смоделированных в MATLAB®.
Этот пример демонстрирует, как опция Quick Loop Tuning Control System Tuner генерирует настраивающиеся цели от вашей частоты среза и технических требований запаса по амплитуде и фазе. Эта опция позволяет вам быстро настроить SISO или обратную связь MIMO для настройки использования формирующего цикл подхода. Пример также показывает, как добавить далее настраивающиеся требования в систему управления после использования опции Quick Loop Tuning.
Quick Loop Tuning является Control System Tuner, эквивалентный из looptune команда.
Откройте модель Simulink.
open_system('rct_distillation')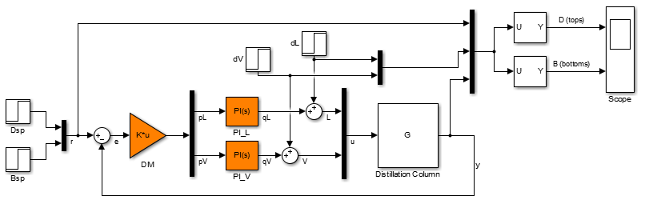
Эта модель представляет столбец дистилляции, полученный в 2D входе, 2D выходной объект G. Настраиваемыми элементами является разъединяющаяся матрица усиления DM, и эти два ПИ-контроллера, PI_L и PI_V. (Для получения дополнительной информации об этой модели, смотрите Разъединяющийся Контроллер для Столбца Дистилляции.)
Предположим, что ваша цель состоит в том, чтобы настроить обратную связь MIMO между r и y к пропускной способности между 0.1 и 0,5 рад/с. Предположим, что вы также требуете запаса по амплитуде 7 дБ и запаса по фазе 45 градусов. Можно использовать опцию Quick Loop Tuning, чтобы быстро сконфигурировать Control System Tuner для этих целей.
Открытый Control System Tuner. В окне модели Simulink, в галерее Apps , нажимают Control System Tuner.
Определяйте блоки, которые вы хотите настроить. Во вкладке Tuning Control System Tuner нажмите![]() Select Blocks. В диалоговом окне Select tuned blocks нажмите Add blocks. Затем выберите
Select Blocks. В диалоговом окне Select tuned blocks нажмите Add blocks. Затем выберите DM, PI_L, и PI_V для настройки. (Для получения дополнительной информации о выборе настроенных блоков, смотрите, Задают Блоки, чтобы Настроить Control System Tuner.)
Модель теперь готова настроиться на целевую пропускную способность и запасы устойчивости.
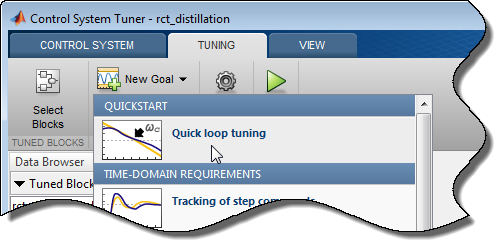
Во вкладке Tuning выберите New Goal> Quick Loop Tuning.
Для Быстрой Настройки Цикла необходимо идентифицировать сигналы привода, и датчик сигнализирует, что разделяют фрагмент объекта системы управления от диспетчера, который в целях Быстрой Настройки Цикла является остальной частью системы управления. Сигналы привода являются контроллерами выход, которые управляют объектом или входными параметрами объекта. Сигналы датчика являются измерениями объекта выход, которые возвращаются в контроллер. В этой системе управления сигналы привода представлены векторным u сигнала, и датчик сигнализирует векторным y сигнала.
В диалоговом окне Quick Loop Tuning, под Specify actuator signals (controls), добавляет сигнал привода, u. Точно так же под Specify sensor signals (measurements), добавьте сигнал датчика, y (Для получения дополнительной информации об определении сигналов для настройки, смотрите, Задают Цели по Интерактивной Настройке.)
Под Desired Goals, в поле Target gain crossover region, вводят целевую область значений пропускной способности, [0.1 0.5]. Введите желаемый запас по амплитуде и запас по фазе в соответствующих полях.
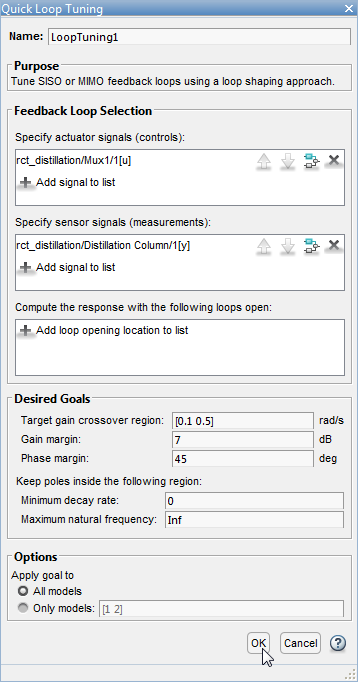
Нажмите OK. Control System Tuner автоматически генерирует настраивающиеся цели, которые получают желаемые цели, которые вы ввели в диалоговое окно.
В этом примере Control System Tuner создает Цель Формы Цикла и Цель Полей. Если бы вы изменили настройки местоположения полюса в диалоговом окне Quick Loop Tuning, цель полюсов была бы также создана.
Нажмите![]() Manage Goals, чтобы исследовать автоматически созданные цели. По умолчанию цели активны и определяются как мягкие настраивающие цели.
Manage Goals, чтобы исследовать автоматически созданные цели. По умолчанию цели активны и определяются как мягкие настраивающие цели.
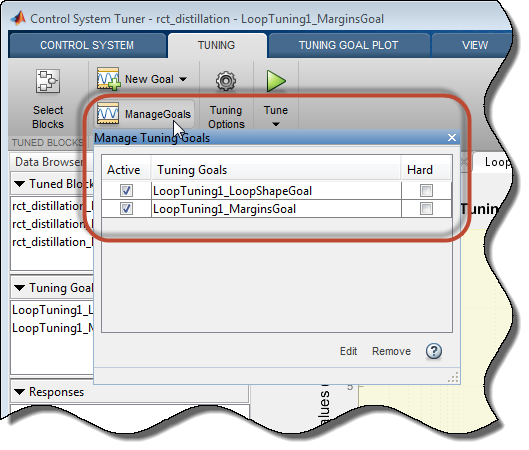
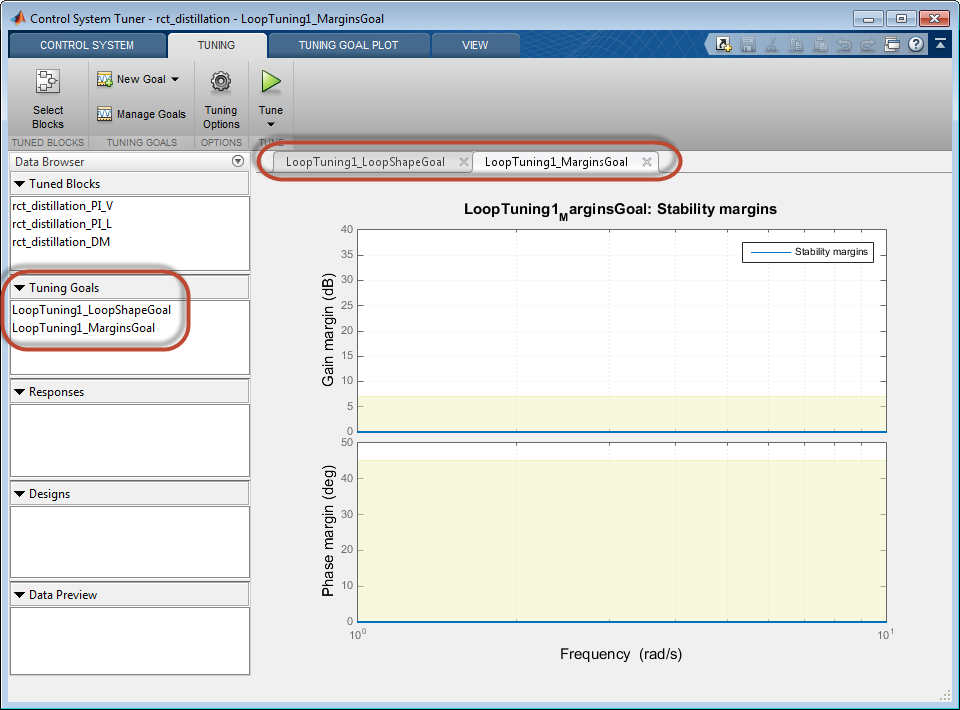
Можно дважды кликнуть настраивающиеся цели исследовать их параметры, которые автоматически вычисляются и заполняются. Можно также исследовать графические представления настраивающихся целей. Во вкладке Tuning исследуйте график LoopTuning1_LoopShapeGoal.
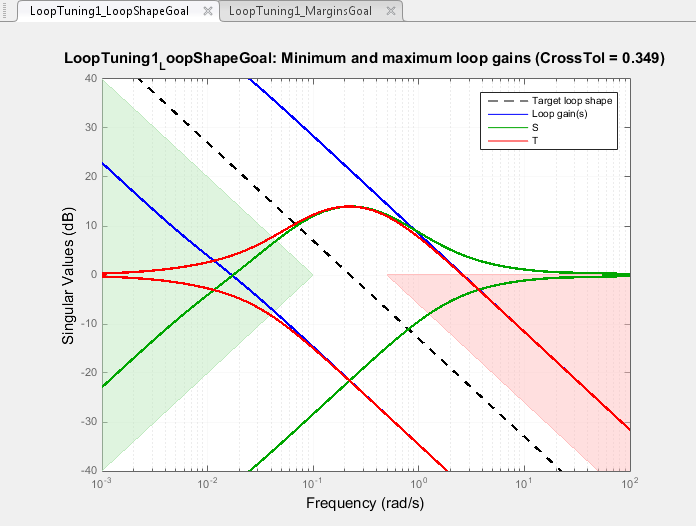
Целевая перекрестная область значений описывается как цель Формы Цикла с профилем коэффициента усиления разомкнутого контура интегратора. Заштрихованные области графика показывают, что разрешенной перекрестной областью значений является [0.1 0.5] rad/s, когда вы задали в диалоговом окне Quick Loop Tuning.
Точно так же ваши маржинальные требования получены в графике LoopTuning1_MarginsGoal.
Нажмите![]() Tune, чтобы настроить модель, чтобы удовлетворить автоматически созданным настраивающимся целям. В настраивающихся целевых графиках вы видите, что требованиям удовлетворяют.
Tune, чтобы настроить модель, чтобы удовлетворить автоматически созданным настраивающимся целям. В настраивающихся целевых графиках вы видите, что требованиям удовлетворяют.
Чтобы создать дополнительные графики для исследования других откликов системы, смотрите, Создают Графики отклика в Control System Tuner.
Если вы хотите изменить свои конструктивные требования после использования Быстрой Настройки Цикла, можно отредактировать автоматически созданные настраивающиеся цели и настроить модель снова. Можно также создать дополнительные настраивающие цели.
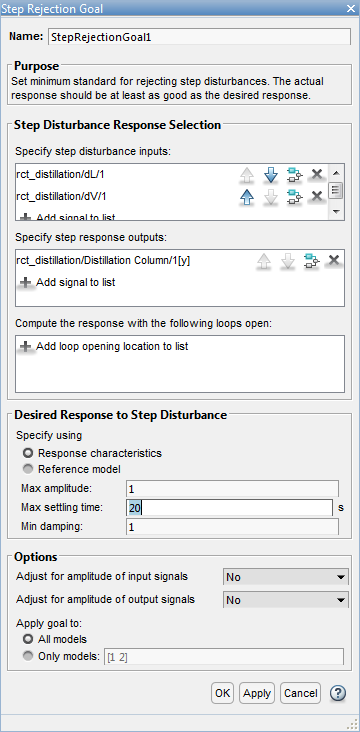
Например, добавьте требование, которое ограничивает ответ на воздействие, примененное во входных параметрах объекта. Ограничьте ответ на команду шага в dL и dV при выходных параметрах, y, быть хорошо ослабленным, обосноваться меньше чем за 20 секунд и не превысить 4 в амплитуде. Выберите New Goal> Rejection of step disturbances и введите соответствующие значения в диалоговое окно Step Rejection Goal. (Для получения дополнительной информации о создании настраивающихся целей, смотрите, Задают Цели по Интерактивной Настройке.)
Можно теперь повторно настроить модель, чтобы удовлетворить всем этим настраивающим целям.