По умолчанию PID Tuner линеаризует ваш объект и проектирует контроллер в рабочей точке, заданной начальными условиями в вашей модели Simulink®. Иногда, эта рабочая точка отличается от рабочей точки, для которой вы хотите спроектировать контроллер. Например, вы хотите спроектировать контроллер для своей системы в установившемся. Однако модель Simulink обычно не в установившемся при начальном условии. В этом случае измените рабочую точку, которую PID Tuner использует для линеаризации вашего объекта и разработки контроллера.
Чтобы установить новую рабочую точку для PID Tuner, используйте один из следующих методов. Метод, который вы выбираете, зависит от информации, которую вы имеете о своей желаемой рабочей точке.
В этом случае установите значения состояния в модели непосредственно.
Закройте PID Tuner.
Установите начальные условия компонентов вашей модели к значениям, которые дают к желаемым условиям работы.
Нажмите Tune в диалоговом окне ПИД-регулятора, чтобы открыть PID Tuner. PID Tuner линеаризует объект с помощью новой рабочей точки по умолчанию и проектирует новый начальный контроллер для новой линейной модели объекта управления.
После того, как PID Tuner генерирует новый первоначальный проект контроллера, продолжите от, Анализируют Проект в PID Tuner.
В этом случае используйте PID Tuner, чтобы повторно линеаризовать модель в конкретном времени симуляции.
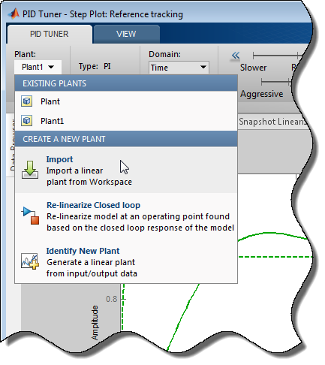
Во вкладке PID Tuner, в меню Plant, выбирают Re-linearize Closed Loop.
Во вкладке Closed Loop Re-Linearization нажмите![]() Run Simulation, чтобы симулировать модель в течение времени, заданного в текстовом поле Simulation Time.
Run Simulation, чтобы симулировать модель в течение времени, заданного в текстовом поле Simulation Time.
PID Tuner строит сигнал ошибки как функцию времени. Можно использовать этот график идентифицировать время, в которое модель находится в установившемся. Двигайте вертикальную панель ко времени снимка состояния, в которое вы хотите линеаризовать модель.
Нажмите![]() Linearize, чтобы линеаризовать модель в выбранное время снимка состояния. PID Tuner вычисляет новый линеаризовавший объект и сохраняет его в рабочую область PID Tuner. PID Tuner автоматически проектирует контроллер для нового объекта и отображает график отклика для новой системы с обратной связью. PID Tuner возвращает вас вкладка PID Tuner, где меню Plant отражает, что новый объект выбран для проекта токового контроллера.
Linearize, чтобы линеаризовать модель в выбранное время снимка состояния. PID Tuner вычисляет новый линеаризовавший объект и сохраняет его в рабочую область PID Tuner. PID Tuner автоматически проектирует контроллер для нового объекта и отображает график отклика для новой системы с обратной связью. PID Tuner возвращает вас вкладка PID Tuner, где меню Plant отражает, что новый объект выбран для проекта токового контроллера.
Примечание
Для моделей с Основанными на триггере блоками Снимка состояния Рабочей точки программное обеспечение получает рабочую точку в событиях, которые инициировали, прежде чем симуляция достигает времени снимка состояния.
После того, как PID Tuner генерирует новый первоначальный проект контроллера, продолжите от, Анализируют Проект в PID Tuner.
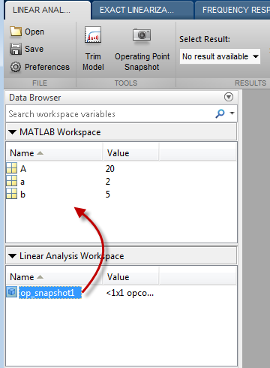
В Model Linearizer перетащите сохраненный объект рабочей точки от Линейной Аналитической Рабочей области до рабочего пространства MATLAB.
В PID Tuner, во вкладке PID Tuner, в меню Plant, выбирают Import.
Выберите Importing an LTI system or linearizing at an operating point defined in MATLAB workspace. Выберите свою экспортируемую рабочую точку в таблице.
Нажмите OK. PID Tuner вычисляет новый линеаризовавший объект и сохраняет его в рабочую область PID Tuner. PID Tuner автоматически проектирует контроллер для нового объекта и отображает график отклика для новой системы с обратной связью. PID Tuner возвращает вас вкладка PID Tuner, где меню Plant отражает, что новый объект выбран для проекта токового контроллера.
После того, как PID Tuner генерирует новый первоначальный проект контроллера, продолжите от, Анализируют Проект в PID Tuner.
