При запуске целевая машина Speedgoat (целевой компьютер) загружает QNX® Neutrino® RTOS. После того, как процесс загрузки завершен, можно развернуть приложение реального времени в целевой компьютер и запустить приложение в одном из этих режимов целевого компьютера:
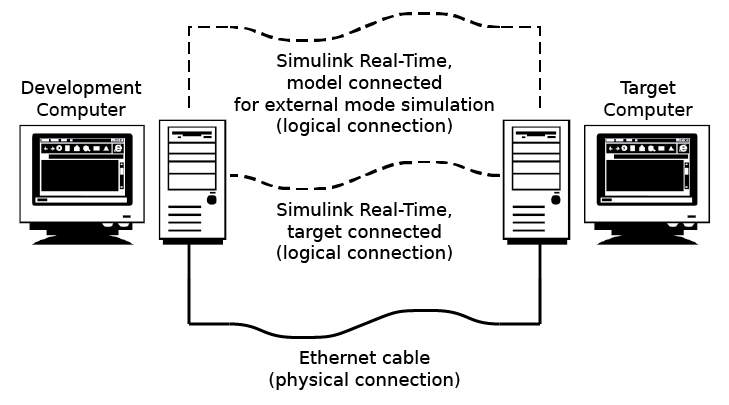
Связанный режим — Чтобы поместить целевой компьютер в связанный режим, переключаются Разъединенные / Связанный выбор на вкладке Simulink® Editor Real-Time. Когда целевой компьютер соединяется, кнопки вкладки Real-Time, Проводник Simulink Real-Time™, и менеджер по Целевому компьютеру обеспечивает интерфейсы к целевому компьютеру и приложению реального времени. На рисунке связанный режим представлен физическим соединением между компьютером разработчика и целевым компьютером плюс логическое соединение между программным обеспечением Simulink Real-Time и целевым компьютером.
Режим external mode — Чтобы запустить приложение реального времени в режим external mode, разверните приложение в целевой компьютер в связанном режиме, и затем на Simulink Editor Real-Time вкладка выбирает Run on Target> Connect Model. Когда целевой компьютер соединяется, и приложение соединяется с моделью, модель обеспечивает интерфейс, чтобы взаимодействовать с приложением. На рисунке режим external mode представлен физическим соединением между компьютером разработчика и целевым компьютером плюс логическое соединение между программным обеспечением Simulink Real-Time и целевым компьютером плюс логическое соединение между моделью на компьютере разработчика и приложением реального времени на целевом компьютере.
Автономный режим — Чтобы управлять целевым компьютером в автономном режиме, управляйте приложением реального времени при помощи интерфейса командной строки с клавиатуры целевого компьютера (консоль) или при помощи интерфейса командной строки через утилиту SSH (например, PuTTY) на компьютере разработчика. На рисунке автономный режим представлен физическим соединением между компьютером разработчика и целевым компьютером. Вы используете эту связь при управлении целевым компьютером удаленно вместо того, чтобы использовать клавиатуру целевого компьютера.
Примечание
Не используйте интерфейс модели и Simulink Real-Time Explorer одновременно, чтобы управлять приложением реального времени.
Физические соединения и логические соединения | Режимы Simulink Real-Time |
|---|---|
Simulink Real-Time устанавливает логическое соединение с целевым компьютером и логическое соединение между моделью на компьютере разработчика и приложением реального времени на целевом компьютере. Simulink Real-Time использует кабель Ethernet для физического соединения | Модель на компьютере разработчика обеспечивает интерфейс, чтобы управлять приложением реального времени в соединенном режиме модели на целевом компьютере в симуляции режима external mode. |
Simulink Real-Time устанавливает логическое соединение с целевым компьютером и использует кабель Ethernet для физического соединения. | Компьютер разработчика и целевой компьютер действуют в соединенном режиме цели. Можно управлять целевым компьютером при помощи Simulink Real-Time Explorer или команд MATLAB. |
Кабель Ethernet обеспечивает физическое соединение между компьютером разработчика и целевым компьютером. | Целевой компьютер действует в автономном режиме. Можно управлять целевым компьютером при помощи клавиатуры целевого компьютера (консоль) или при помощи PuTTY, чтобы отправить команды от компьютера, которому не установили MATLAB. |
Нет никакого физического или логического соединения между компьютером разработчика и целевыми компьютерами. | Целевой компьютер действует в автономном режиме. Можно управлять целевым компьютером при помощи клавиатуры целевого компьютера (консоль). |
