Когда вы разрабатываете несколько моделей компонента программного обеспечения AUTOSAR, которые соединяются и работают совместно, можно объединить их в модели состава AUTOSAR для симуляции. Состав является компонентом программного обеспечения AUTOSAR, который агрегировал связанные группы компонентов программного обеспечения.
Чтобы создать представление Simulink® состава AUTOSAR, примите одни из этих мер:
Импортируйте AUTOSAR XML (ARXML) описание состава (Классическая Платформа).
Создайте модель и используйте блоки Model для ссылки и соедините модели компонента AUTOSAR.
В качестве альтернативы, если у вас есть программное обеспечение System Composer™, можно создать модель архитектуры AUTOSAR и использовать блоки Software Composition для составов модели AUTOSAR. Для получения дополнительной информации смотрите, что Программная архитектура Моделирует.
Когда вы симулируете модель состава, вы симулируете объединенное поведение агрегированных компонентов AUTOSAR.
После того, как вы разрабатываете компоненты AUTOSAR и составы, можно протестировать группы компонентов, которые принадлежат вместе симуляции уровня системы. Например, можно создать системную модель, содержащую составы, компоненты, планировщик, модель объекта управления, и потенциально Основные компоненты Программного сервиса и вызывающие стороны. Можно сконфигурировать системные модели, чтобы выполнить системные симуляции или разомкнутого контура с обратной связью.
Состав является компонентом программного обеспечения AUTOSAR, который агрегировал связанные группы компонентов программного обеспечения. Составы поддерживают масштабирование компонента и помогают управлять сложностью в проекте.
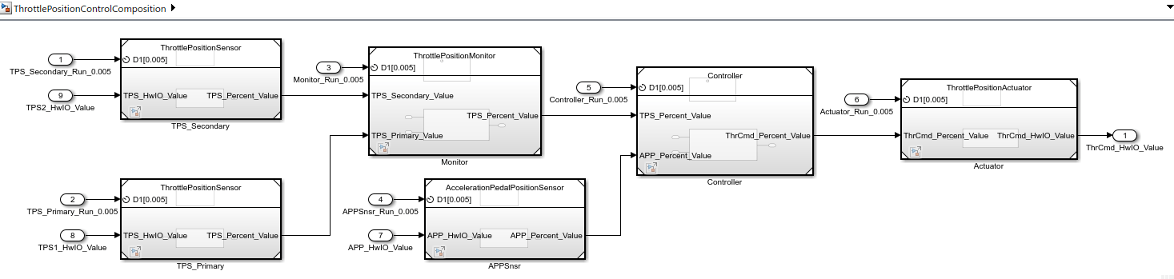
Если вы разрабатываете компоненты программного обеспечения для Классической Платформы AUTOSAR, можно создать модель состава AUTOSAR путем импорта описания состава из файлов ARXML. Используйте функцию средства импорта AUTOSAR createCompositionAsModel. Этот вызов функции создает модель ThrottlePositionControlComposition состава из примера файл ARXML ThrottlePositionControlComposition.arxml. Файл ARXML расположен в matlabroot/examples/autosarblockset/data
ar = arxml.importer('ThrottlePositionControlComposition.arxml'); createCompositionAsModel(ar,'/Company/Components/ThrottlePositionControlComposition');
Чтобы симулировать объединенное поведение агрегированных компонентов AUTOSAR, симулируйте модель состава. Нажмите кнопку Run в окне модели или введите эту команду MATLAB.
simOutComposition = sim('ThrottlePositionControlComposition');Для получения дополнительной информации смотрите Импорт Состав AUTOSAR к Simulink.
Чтобы объединить связанные компоненты программного обеспечения AUTOSAR в модели состава для симуляции, создайте модель Simulink и используйте блоки Model для ссылки и соедините модели компонента AUTOSAR.
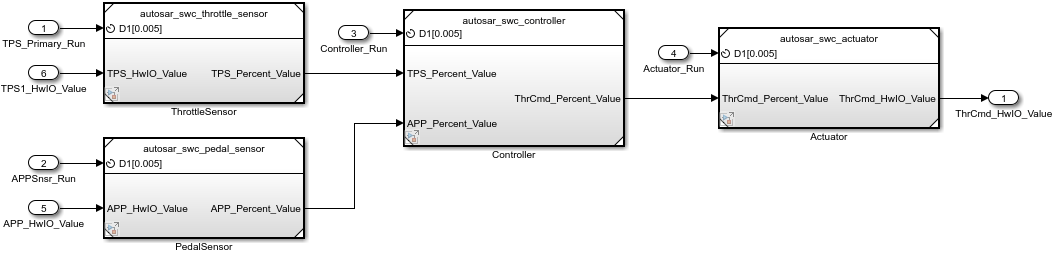
Этот пример создает модель состава AUTOSAR. Созданная модель является упрощенной версией модели autosar_composition в качестве примера AUTOSAR. Чтобы ускорить настройку и решить вопросы, можно сравнить новую модель с моделью autosar_composition в качестве примера. В случае необходимости можно скопировать элементы, такие как импорт и выходные порты между моделями. Для схемы законченной модели состава смотрите шаг 4.
Переместите модели компонента программного обеспечения AUTOSAR, которые вы хотите симулировать вместе в рабочую папку и cd к той папке. Этот пример использует модели компонента, скопированные с matlabroot/examples/autosarblockset/maincd к папке).
autosar_swc_actuator
autosar_swc_controller
autosar_swc_pedal_sensor
autosar_swc_throttle_sensor
Создайте модель Simulink. Сохраните модель в рабочую папку с именем composition.
Для каждой модели компонента AUTOSAR:
Откройте модель компонента отдельно и проверьте, что она симулирует.
В composition модель, добавляет блок Model и конфигурирует блок, чтобы сослаться на компонент. В параметрах блоков Model выберите опцию Schedule rates. Эта опция позволяет основанным на уровне выполнимым задачам быть запланированными на том же базисе как экспортируемые функции.
Добавьте порты, которых требует компонент.
Модель компонента autosar_swc_throttle_sensor требует специальной корректировки, потому что родительская модель composition (различающаяся модель autosar_composition в качестве примера) ссылается на компонент только однажды. Откройте Model Explorer, выберите рабочее пространство модели для autosar_swc_throttle_sensor, выберите объект данных TPSPercent_LkupTbl, и очистите опцию Argument.
Когда вы создадите блоки Model для каждого компонента AUTOSAR, соедините компоненты как показано здесь.
Чтобы симулировать объединенное поведение агрегированных компонентов AUTOSAR, симулируйте модель состава. Нажмите кнопку Run в окне модели или введите эту команду MATLAB.
simOutComposition = sim('composition');Для получения дополнительной информации см. Проект и Симулируйте Компоненты AUTOSAR и Сгенерируйте Код.
После того, как вы разрабатываете компоненты AUTOSAR и составы, можно протестировать группы компонентов, которые принадлежат вместе симуляции уровня системы. Например, можно создать системную модель, содержащую составы, компоненты, модель объекта управления, и потенциально Основные компоненты Программного сервиса и вызывающие стороны. Можно сконфигурировать системные модели, чтобы выполнить системные симуляции или разомкнутого контура с обратной связью. Для системной модели используйте модель Simulink или модель тестовой обвязки Simulink Test™.
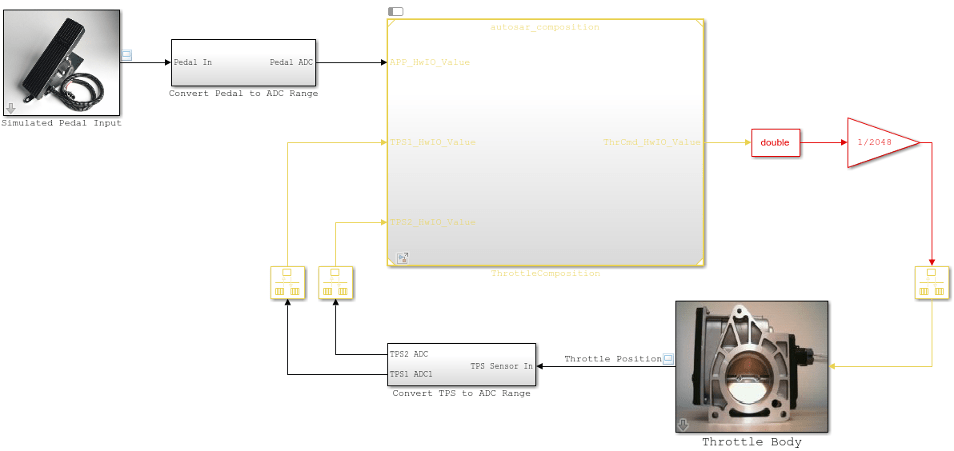
Для примера симуляции с обратной связью откройте модель autosar_system в качестве примера. Эта модель обеспечивает тестовую обвязку уровня системы для модели autosar_composition состава AUTOSAR.
addpath(fullfile(matlabroot,'/examples/autosarblockset/main')); addpath(fullfile(matlabroot,'/examples/autosarblockset/data')); open_system('autosar_system');
Осциллограф положения дросселя открывается моделью. Если вы симулируете системную модель autosar_system, осциллограф указывает как хорошо позиционные дросселем алгоритмы управления в модели autosar_composition состава отслеживают вход педали. Чтобы улучшить поведение, можно изменить алгоритмы компонента в составе или изменить источник датчика.
simOutSystem = sim('autosar_system');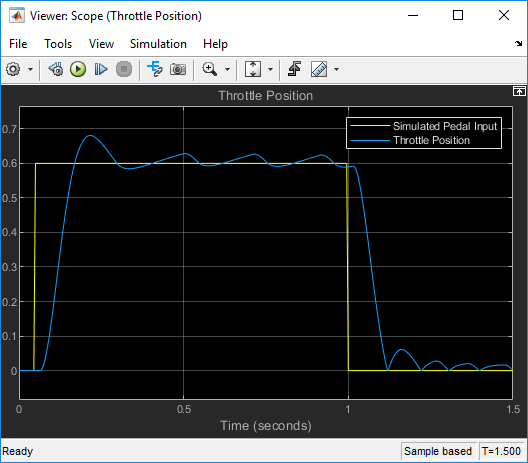
Для получения дополнительной информации см. Проект и Симулируйте Компоненты AUTOSAR и Сгенерируйте Код.
Для примера симуляции разомкнутого контура с помощью Simulink Test смотрите Тестирование Составы AUTOSAR (Simulink Test). Этот пример выполняет спина к спине тестирование на модель состава AUTOSAR.
Для примера симуляции AUTOSAR Основные Программные сервисы смотрите, Симулируют Основные Программные сервисы AUTOSAR и Среду выполнения.
