Чтобы сконфигурировать планирование и симуляцию для модели архитектуры AUTOSAR, вы можете:
Добавьте Basic Software (BSW) блоки, чтобы симулировать вызовы сервисов BSW.
Создайте модель тестовой обвязки, чтобы соединить входные параметры и элементы объекта к модели архитектуры.
Используйте Редактор Расписания, чтобы запланировать и задать порядок выполнения компонента runnables.
Чтобы симулировать поведение агрегированных компонентов в модели открытой архитектуры, нажмите Run.
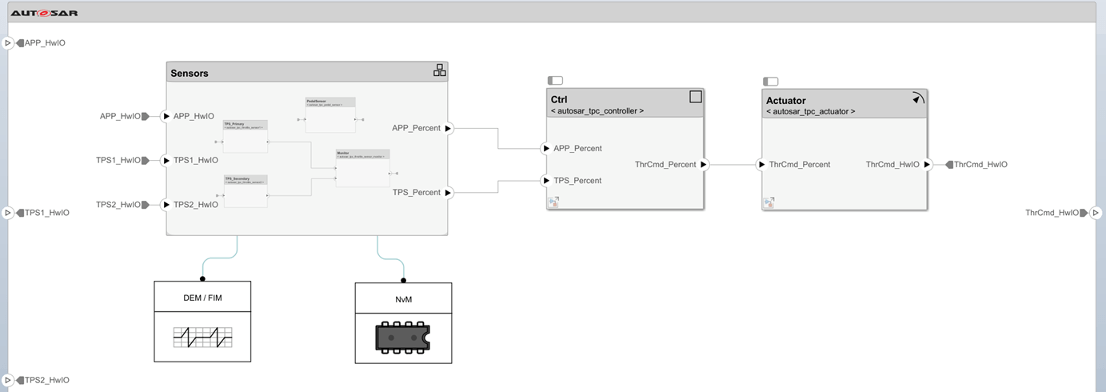
Для Классической Платформы AUTOSAR AUTOSAR Blockset обеспечивает Basic Software (BSW) блоки, которые позволяют вам моделировать вызовы компонента программного обеспечения сервисов BSW, которые запускаются в среде выполнения AUTOSAR. Сервисы BSW включают менеджера NVRAM (NvM), Диагностический менеджер событий (DEM) и Функциональный менеджер по Ингибированию (FiM). В среде выполнения, компоненты программного обеспечения AUTOSAR обычно доступ сервисы BSW, использующие клиент-сервер или коммуникация приемника отправителя.
Чтобы симулировать компоненты AUTOSAR, которые вызывают сервисы BSW, вы создаете содержание архитектуры, состава или модели тестовой обвязки и добавляете предварительно сконфигурированные сервисные блоки компонента BSW. Блоки обеспечивают ссылочные реализации сервисных операций BSW.
Если компоненты в вашей модели архитектуры используют блоки вызывающей стороны BSW, убедитесь, что модель архитектуры содержит реализации услуги BSW. Для получения дополнительной информации смотрите AUTOSAR Модели Основные Вызовы Программного сервиса и Симулируйте Основные Программные сервисы AUTOSAR и Среду выполнения.
Для примера использования блоков BSW в модели архитектуры AUTOSAR смотрите Автора Составы AUTOSAR и Компоненты в Модели Архитектуры.
После того, как вы разрабатываете модель архитектуры, можно соединить ее с моделью тестовой обвязки, которая обеспечивает значимые входные значения и элементы модели объекта управления. Например, рассмотрите модель autosar_tpc_composition архитектуры от Автора в качестве примера Составы AUTOSAR и Компоненты в Модели Архитектуры. Модель имеет три, требуют (вход) портов, и каждый обеспечивает (выход) порт.
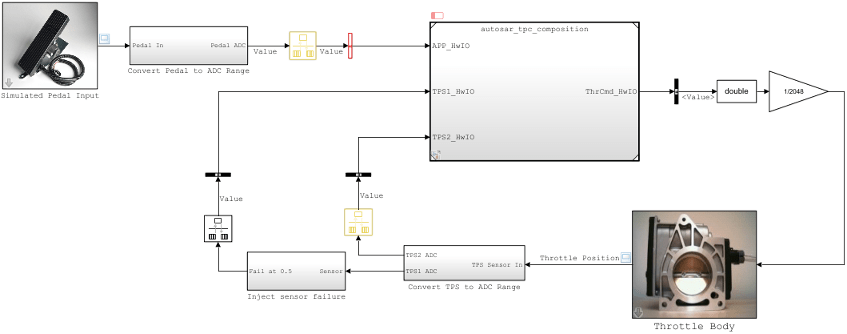
Вот модель тестовой обвязки для симуляции модели autosar_tpc_composition архитектуры. Тестовая обвязка содержит модель объекта управления с входным блоком педали и сигналами, которые соответствуют модели архитектуры, требуют и обеспечивают порты. Эта модель была адаптирована из модели autosar_tpc_system в качестве примера.

Соединять модель архитектуры с тестовой обвязкой:
Вставьте блок Model.
Сконфигурируйте блок Model, чтобы сослаться на модель архитектуры.
В диалоговом окне блока Model выберите опцию Schedule rates. Для связанного параметра Schedule rates with выберите Schedule Editor. Компоненты модели архитектуры имеют явные разделы, которые можно запланировать с Редактором Расписания.
Соедините порты модели архитектуры с сигналами тестовой обвязки.
Чтобы просмотреть и запустить завершенную модель тестовой обвязки, откройте модель autosar_tpc_system в качестве примера. (Чтобы открыть модель в локальной рабочей папке, использовать openExample('autosar_tpc_system').)
Для Классических компонентов программного обеспечения Платформы AUTOSAR, которые содержат несколько runnables, AUTOSAR, Синхронизация спецификации Расширений задает ограничения порядка выполнения. Эти ограничения задают порядок выполнения выполнимых сущностей в компоненте. Можно просмотреть и управлять ограничениями на уровне компонента или, в моделях архитектуры AUTOSAR, на уровне Шины виртуальной функции (VFB).
В моделях архитектуры вы можете:
Импортируйте ограничения порядка выполнения VFB-уровня из файлов ARXML.
Используйте Редактор Расписания, чтобы изменить порядок выполнения компонента AUTOSAR runnables. Редактор отображает каждое выполнимое в каждом компоненте в иерархии состава.
Как часть экспорта состава, экспортируйте ограничения порядка выполнения VFB-уровня в ARXML синхронизация модуля, modelname_timing.arxml
Чтобы запланировать и задать порядок выполнения компонента AUTOSAR runnables, используйте Редактор Расписания. От автономной модели компонента или модели архитектуры, вы можете:
Просмотрите графическое представление компонента runnables как разделы в компоненте AUTOSAR или модели архитектуры.
Создайте разделы и сопоставьте их с AUTOSAR runnables.
Непосредственно задайте порядок выполнения runnables.
Редактор Расписания поддерживает несколько стилей моделирования, включая моделирование основанного на уровне и экспорта функций. Для получения дополнительной информации смотрите Используя Редактор Расписания и Создайте Разделы. Для примеров модели компонента AUTOSAR смотрите, Конфигурируют Выполнимый Порядок выполнения AUTOSAR.
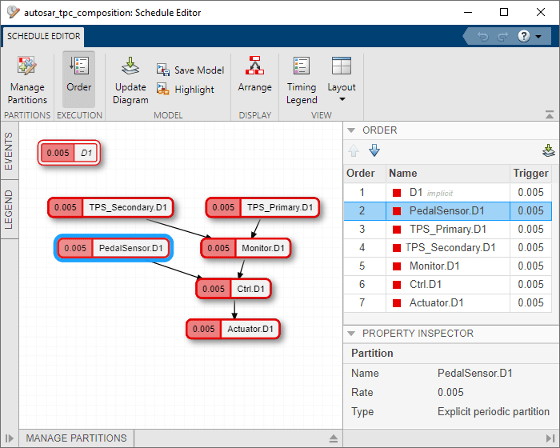
В модели архитектуры AUTOSAR, чтобы открыть Редактор Расписания, открывают вкладку Modeling и выбирают Design Tools> Schedule Editor. Редактор отображает каждое выполнимое в каждом компоненте в иерархии состава. Вот представление порядка выполнения, когда вы открываете Редактор Расписания из модели autosar_tpc_composition архитектуры в качестве примера. Используйте средства управления редактором, чтобы изменить порядок выполнения runnables.
Экспорт состава из модели архитектуры AUTOSAR экспортирует ограничения порядка выполнения VFB-уровня в файл modelname_timing.arxmlautosar_tpc_composition, на основе Редактора Расписания настройка.
<VFB-TIMING UUID="...">
<SHORT-NAME>TPC_Composition</SHORT-NAME>
<TIMING-REQUIREMENTS>
<EXECUTION-ORDER-CONSTRAINT UUID="...">
<SHORT-NAME>EOC</SHORT-NAME>
<BASE-COMPOSITION-REF DEST="COMPOSITION-SW-COMPONENT-TYPE">
/Components/TPC_Composition
</BASE-COMPOSITION-REF>
<ORDERED-ELEMENTS>
<EOC-EXECUTABLE-ENTITY-REF UUID="...">
<SHORT-NAME>PedalSensor_PedalSensor_Step</SHORT-NAME>
<COMPONENT-IREF>
<TARGET-COMPONENT-REF DEST="SW-COMPONENT-PROTOTYPE">
/Components/Sensors/PedalSensor
</TARGET-COMPONENT-REF>
</COMPONENT-IREF>
<EXECUTABLE-REF DEST="RUNNABLE-ENTITY">
/Components/PedalSensor/PedalSensor_IB/PedalSensor_Step
</EXECUTABLE-REF>
<SUCCESSOR-REFS>
<SUCCESSOR-REF DEST="EOC-EXECUTABLE-ENTITY-REF">
/Timing/TPC_Composition/EOC/TPS_Primary_ThrottleSensor1_Step
</SUCCESSOR-REF>
</SUCCESSOR-REFS>
</EOC-EXECUTABLE-ENTITY-REF>
<EOC-EXECUTABLE-ENTITY-REF UUID="...">
<SHORT-NAME>TPS_Primary_ThrottleSensor1_Step</SHORT-NAME>
...
</EOC-EXECUTABLE-ENTITY-REF>
<EOC-EXECUTABLE-ENTITY-REF UUID="...">
<SHORT-NAME>TPS_Secondary_ThrottleSensor2_Step</SHORT-NAME>
...
</EOC-EXECUTABLE-ENTITY-REF>
<EOC-EXECUTABLE-ENTITY-REF UUID="...">
<SHORT-NAME>Monitor_ThrottleSensorMonitor_Step</SHORT-NAME>
...
</EOC-EXECUTABLE-ENTITY-REF>
<EOC-EXECUTABLE-ENTITY-REF UUID="...">
<SHORT-NAME>Ctrl_Controller_Step</SHORT-NAME>
...
</EOC-EXECUTABLE-ENTITY-REF>
<EOC-EXECUTABLE-ENTITY-REF UUID="...">
<SHORT-NAME>Actuator_Actuator_Step</SHORT-NAME>
<COMPONENT-IREF>
<TARGET-COMPONENT-REF DEST="SW-COMPONENT-PROTOTYPE">
/Components/TPC_Composition/Actuator
</TARGET-COMPONENT-REF>
</COMPONENT-IREF>
<EXECUTABLE-REF DEST="RUNNABLE-ENTITY">
/Components/Actuator/Actuator_IB/Actuator_Step
</EXECUTABLE-REF>
</EOC-EXECUTABLE-ENTITY-REF>
</ORDERED-ELEMENTS>
</EXECUTION-ORDER-CONSTRAINT>
</TIMING-REQUIREMENTS>
<COMPONENT-REF DEST="COMPOSITION-SW-COMPONENT-TYPE">
/Components/TPC_Composition
</COMPONENT-REF>
</VFB-TIMING>Diagnostic Service Component | NVRAM Service Component | Запланируйте редактор
