AUTOSAR адаптивная сервисная коммуникация предоставляет возможность конфигурировать приложения, чтобы использовать одноразовое или динамическое открытие, чтобы подписаться на сервисы. Режим открытия по умолчанию, OneTime, позволяет приложению AUTOSAR находить и подписываться на сервисы при инициализации. Этот режим открытия может потребовать, чтобы сервисы были запущены перед приложением. Можно изменить сервисный режим открытия в DynamicDiscovery чтобы позволить приложению AUTOSAR найти и подписаться на сервисы как, они становятся доступными.
Можно сконфигурировать, в модели или программно, сервисный режим открытия каждого необходимого порта услуг как OneTime или DynamicDiscovery:
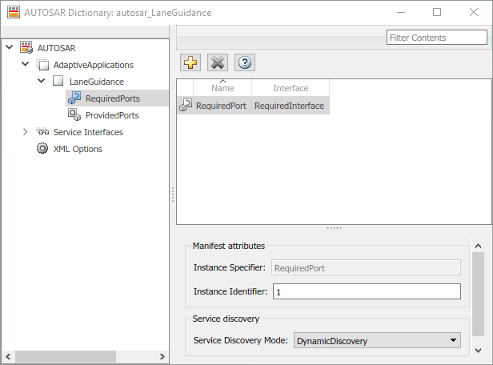
Из вашей модели можно использовать Словарь AUTOSAR, чтобы открыть атрибуты Service discovery требуемых портов и выбрать их сервисные режимы открытия.
В этом примере показано, как установить требуемый порт на DynamicDiscovery.
Программно, можно использовать set функция от getAUTOSARProperties API, чтобы сконфигурировать сервисный режим открытия.
В этом примере показано, как установить требуемый порт на DynamicDiscovery.
hModel = 'autosar_LaneGuidance'; addpath(fullfile(matlabroot,'/examples/autosarblockset/main')); open_system(hModel); apiObj = autosar.api.getAUTOSARProperties(hModel); set(apiObj,"/LaneGuidance_pkg/LaneGuidance_swc/LaneGuidance/RequiredPort/", ... "ServiceDiscoveryMode", "DynamicDiscovery")
Сервисное значение режима открытия влияет на сгенерированный Код С++ (в файле исходного кода модели) в следующих двух местах:
Сайт вызова StartFindService API и регистрация коллбэка (для обоих InstanceIdentifier и InstanceSpecifier варианты).
// Model initialize function
void autosar_LaneGuidanceModelClass::initialize()
{
ProvidedPort = std::make_shared< company::chassis::provided::skeleton::
ProvidedInterfaceSkeleton >(ara::com::InstanceIdentifier("2"), ara::com::
MethodCallProcessingMode::kPoll);
ProvidedPort->OfferService();
company::chassis::required::proxy::RequiredInterfaceProxy::StartFindService
(std::move(std::bind(&autosar_LaneGuidanceModelClass::RequiredPortSvcHandler,
this, std::placeholders::_1, std::placeholders::_2)), ara::com::
InstanceIdentifier("1"));
}Определение функции обратного вызова.
void autosar_LaneGuidanceModelClass::RequiredPortSvcHandler(ara::com::
ServiceHandleContainer< company::chassis::required::proxy::
RequiredInterfaceProxy::HandleType > svcHandles, const ara::com::
FindServiceHandle fsHandle)
{
if ((!RequiredPort) && (svcHandles.size() > 0U)) {
RequiredPort = std::make_shared< company::chassis::required::proxy::
RequiredInterfaceProxy >(*svcHandles.begin());
RequiredPort->leftCarInBlindSpot.Subscribe(1U);
RequiredPort->leftLaneDistance.Subscribe(1U);
RequiredPort->leftTurnIndicator.Subscribe(1U);
RequiredPort->rightCarInBlindSpot.Subscribe(1U);
RequiredPort->rightLaneDistance.Subscribe(1U);
RequiredPort->rightTurnIndicator.Subscribe(1U);
company::chassis::required::proxy::RequiredInterfaceProxy::StopFindService
(fsHandle);
}
}