Сформируйте ответ разомкнутого контура обратной связи при использовании Control System Tuner.
Цель Формы цикла задает целевой gain profile (усиление в зависимости от частоты) ответа разомкнутого контура. Цель Формы цикла ограничивает разомкнутый контур, ответ "точка-точка" (L) в заданном местоположении в вашей системе управления.
Когда вы настраиваете систему управления, целевой профиль коэффициента усиления разомкнутого контура преобразован в ограничения на обратную функцию чувствительности inv (S) = (I + L) и дополнительную функцию чувствительности T = 1–S. Эти ограничения проиллюстрированы для настроенной системы представителя в следующем рисунке.
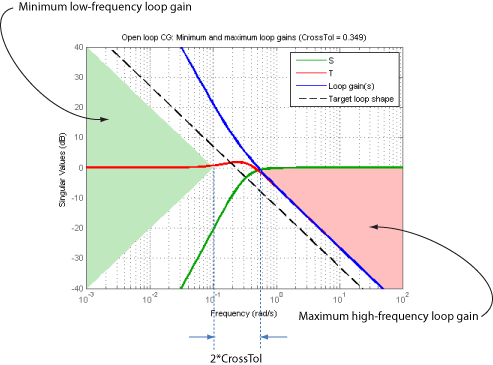
Где L очень больше 1, минимальное ограничение усиления на inv (S) (зеленая теневая область) эквивалентно минимальному ограничению усиления на L. Точно так же, где L намного меньше, чем 1, максимальное ограничение усиления на T (красная теневая область) эквивалентно максимальному ограничению усиления на L. Разрыв между этими двумя ограничениями является дважды перекрестным допуском, который задает диапазон частот, где усиление цикла может пересечь 0 дБ.
Для мультивхода, мультивыход (MIMO) системы управления, значения в профиле усиления, больше, чем 1, интерпретированы как минимальные требования к производительности. Такие значения являются нижними границами на самом маленьком сингулярном значении ответа разомкнутого контура. Получите значения профиля, меньше чем один интерпретирован как минимальные требования спада, которые являются верхними границами на самом большом сингулярном значении ответа разомкнутого контура. Для получения дополнительной информации о сингулярных значениях, смотрите sigma.
Используйте Цель Формы Цикла, когда форма цикла около перекрестного соединения будет проста или хорошо изученная (такие как интегральное действие). Чтобы задать только высокое усиление или низко получить ограничения в определенных диапазонах частот, используйте Минимальную Цель Усиления Цикла или Максимальную Цель Усиления Цикла. Когда вы делаете так, программное обеспечение определяет лучшую форму цикла около перекрестного соединения.
Во вкладке Tuning Control System Tuner выберите New Goal> Target shape for open-loop response, чтобы создать Цель Формы Цикла.
При настройке систем управления в командной строке используйте TuningGoal.LoopShape задавать цель формы цикла.
Используйте этот раздел диалогового окна, чтобы задать местоположения сигнала, в которых можно вычислить коэффициент усиления разомкнутого контура. Можно также задать дополнительные открывающие цикл местоположения для оценки настраивающейся цели.
Shape open-loop response at the following locations
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно вычислить и ограничить коэффициент усиления разомкнутого контура. Чтобы ограничить ответ SISO, выберите однозначное местоположение. Например, чтобы ограничить коэффициент усиления разомкнутого контура в местоположении под названием 'y', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'y'. Чтобы ограничить ответ MIMO, выберите несколько сигналов или сигнал с векторным знаком.
Compute response with the following loops open
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно открыть обратную связь в целях оценки этой настраивающей цели. Настраивающаяся цель оценена против настройки разомкнутого контура, созданной вводной обратной связью в местоположениях, которые вы идентифицируете. Например, чтобы оценить настраивающуюся цель с открытием в местоположении под названием 'x', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'x'.
Совет
Чтобы подсветить любой выбранный сигнал в модели Simulink®, щелкнуть![]() . Чтобы удалить сигнал из списка вводов или выводов, щелкнуть
. Чтобы удалить сигнал из списка вводов или выводов, щелкнуть![]() . Когда вы выбрали несколько сигналов, можно переупорядочить их использование
. Когда вы выбрали несколько сигналов, можно переупорядочить их использование![]() и
и![]() . Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
. Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
Используйте этот раздел диалогового окна, чтобы задать целевую форму цикла.
Pure integrator wc/s
Проверяйте, чтобы задать чистый интегратор и частоту среза для целевой формы цикла. Например, чтобы задать профиль интегральной составляющей с частотой среза 10 рад/с, войдите 10 в текстовое поле Crossover frequency wc.
Other gain profile
Проверяйте, чтобы задать целевую форму цикла в зависимости от частоты. Введите SISO числовая модель LTI, величина которой представляет желаемый профиль усиления. Например, можно задать сглаженную передаточную функцию (tf, zpk, или ss модель). В качестве альтернативы можно делать набросок кусочной целевой формы цикла с помощью frd модель. Когда вы делаете так, программное обеспечение автоматически сопоставляет профиль со сглаженной передаточной функцией, которая аппроксимирует желаемую форму цикла. Например, чтобы задать целевую форму цикла 100 на 40 дБ ниже 0,1 рад/с, прокручивающихся прочь на уровне-20 дБ/десятилетие на более высоких частотах, вводят frd([100 100 10],[0 1e-1 1]).
Если вы настраиваетесь в дискретное время, можно задать форму цикла как модель дискретного времени с тем же шагом расчета, который вы используете для настройки. Если вы задаете форму цикла в непрерывное время, настраивающееся программное обеспечение дискретизирует его. Определение формы цикла в дискретное время дает вам больше контроля формой цикла около частоты Найквиста.
Используйте этот раздел диалогового окна, чтобы указать, что дополнительные характеристики цикла формируют цель.
Enforce loop shape within
Задайте допуск в месте частоты среза в десятилетиях. Например, чтобы позволить перекрестные соединения усиления в течение пяти лет по обе стороны от целевой частоты среза, войдите 0.5. Увеличьте перекрестный допуск, чтобы увеличить способность настраивающегося алгоритма осуществить целевую форму цикла для всех циклов в системе управления MIMO.
Enforce goal in frequency range
Ограничьте осуществление настраивающейся цели к конкретному диапазону частот. Задайте диапазон частот как вектор-строку из формы [min,max], описанный в единицах частоты вашей модели. Например, чтобы создать настраивающуюся цель, которая применяется только между 1 и 100 рад/с, введите [1,100]. По умолчанию настраивающаяся цель применяется на всех частотах в течение непрерывного времени, и до частоты Найквиста в течение дискретного времени.
Stabilize closed loop system
По умолчанию настраивающаяся цель налагает требование устойчивости к передаточной функции с обратной связью от заданных входных параметров до выходных параметров, в дополнение к ограничению усиления. Если устойчивость не требуется или не может быть достигнута, выберите No удалить требование устойчивости. Например, если ограничение усиления применяется к нестабильной передаточной функции разомкнутого контура, выберите No.
Equalize loop interactions
Для многоконтурного или ограничений усиления цикла MIMO, каналы обратной связи автоматически перемасштабируются, чтобы компенсировать недиагональное (взаимодействие цикла) условия в передаточной функции разомкнутого контура. Выберите Off отключить такое масштабирование и сформировать немасштабированный ответ разомкнутого контура.
Apply goal to
Используйте эту опцию при настройке многоуровневых моделей целиком, таких как массив моделей, полученных путем линеаризации модели Simulink в различных рабочих точках или значениях параметров блоков. По умолчанию активные настраивающие цели осуществляются для всех моделей. Чтобы осуществить настраивающееся требование для подмножества моделей в массиве, выберите Only Models. Затем введите индексы массива моделей, для которых осуществляется цель. Например, предположите, что вы хотите применить настраивающуюся цель к вторым, третьим, и четвертым моделям в массиве моделей. Чтобы ограничить осуществление требования, введите 2:4 в текстовом поле Only Models.
Для получения дополнительной информации о настройке для многоуровневых моделей, смотрите Устойчивые Настраивающие Подходы (Robust Control Toolbox).
Когда вы настраиваете систему управления, программное обеспечение преобразует каждую настраивающую цель в нормированное скалярное значение f (x). Здесь, x является вектором из свободных (настраиваемых) параметров в системе управления. Программное обеспечение затем настраивает значения параметров, чтобы минимизировать f (x) или управлять f (x) ниже 1, если настраивающейся целью является трудное ограничение.
Для Loop Shape Goal f (x) дают:
S = D –1 [I – L (s, x)] –1D является масштабированной функцией чувствительности.
L (s, x) является сформированным ответом разомкнутого контура.
D является автоматически вычисленным масштабным коэффициентом цикла. (Если Equalize loop interactions установлен в Off, затем D = I.)
T = S – I является дополнительной функцией чувствительности.
WS и WT являются функциями взвешивания частоты, выведенными из заданной формы цикла. Усиления этих функций примерно совпадают с вашей заданной формой цикла и ее инверсией, соответственно, для значений в пределах от-20 дБ к 60 дБ. По числовым причинам функции взвешивания выравниваются вне этой области значений, если заданный профиль усиления не изменяет наклон вне этой области значений. Поскольку полюса WS или WT близко к s = 0 или s = Inf может привести к плохому числовому созданию условий для настройки, не рекомендуется задать формы цикла с очень низкочастотной или очень высокочастотной динамикой. Для получения дополнительной информации о регуляризации и ее эффектах, смотрите, Визуализируют Настраивающиеся Цели.
Эта настраивающая цель налагает неявное ограничение устойчивости на функцию чувствительности с обратной связью, измеренную в заданном, оцененном с циклами, открытыми в заданных открывающих цикл местоположениях. Движущими силами, затронутыми этим неявным ограничением, является stabilized dynamics для этой настраивающей цели. Minimum decay rate и Maximum natural frequency, настраивающий опции, управляют нижними и верхними границами на этих неявно ограниченных движущих силах. Если оптимизации не удается соответствовать границам по умолчанию, или если конфликт границ по умолчанию с другими требованиями, на вкладке Tuning, использует Tuning Options, чтобы изменить значения по умолчанию.
