Нулевое полюсом упрощение уменьшает порядок вашей модели точно путем отмены нулевых полюсом пар или устранения состояний, которые не оказывают влияния на полный ответ модели. Нулевые полюсом пары могут быть введены, например, когда вы создаете архитектуры с обратной связью. Нормальные небольшие ошибки, сопоставленные с численным расчетом, могут преобразовать такие пары отмены в почти отмену пар. Удаление этих состояний сохраняет характеристики ответа модели при упрощении анализа и системы управления. Типы нулевого полюсом упрощения включают:
Структурное устранение — Устраняет состояния, которые структурно отключаются от вводов или выводов. Устранение структурно разъединенных состояний является хорошим первым шагом в снижении сложности модели, потому что процесс не включает численного расчета. Это также сохраняет структуру состояния остающихся состояний. Такие структурно неминимальные состояния могут возникнуть, например, когда вы линеаризуете модель Simulink®, которая включает некоторое несвязанное пространство состояний или блоки передаточной функции. В командной строке выполните структурное устранение с sminreal.
Удаление нулей-полюсов или минимальная реализация — Устраняют отмену или почти отмену нулевых полюсом пар от передаточных функций. Устраните неразличимые или неконтролируемые состояния из моделей в пространстве состояний. В командной строке выполните этот вид упрощения с minreal.
В приложении Model Reducer и Уменьшать Live Editor Порядка Модели задача, метод Pole-Zero Simplification автоматически устраняет структурно отключенные состояния и также выполняет удаление нулей-полюсов или минимальную реализацию.
Model Reducer обеспечивает интерактивный инструмент для выполнения снижения сложности модели и исследования и сравнения ответов исходных моделей и моделей уменьшаемого порядка. Уменьшать модель нулевым полюсом упрощением в Model Reducer:
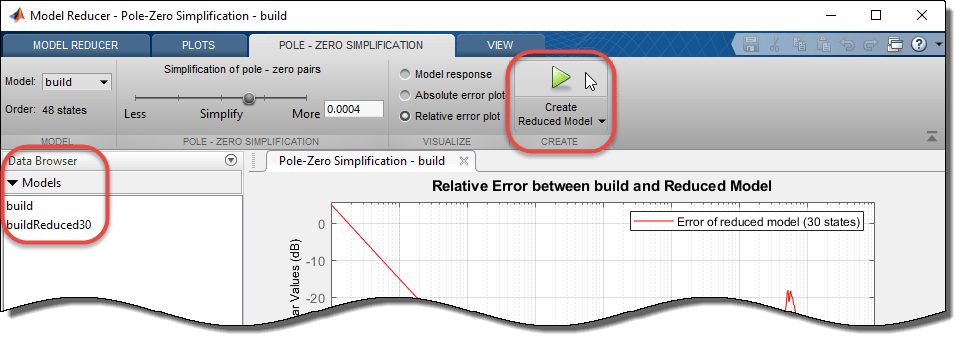
Откройте приложение и импортируйте модель, чтобы уменьшать. Например, предположите, что существует модель под названием build в рабочей области MATLAB®. Следующая команда открывает Model Reducer и импортирует модель LTI build.
modelReducer(build)
В Data Browser выберите модель, чтобы уменьшать. Нажмите![]() Pole-Zero Simplification.
Pole-Zero Simplification.
Во вкладке Pole-Zero Simplification Model Reducer отображает график частотной характеристики исходной модели и уменьшаемой версии модели. Приложение также отображает нулевую полюсом карту обеих моделей.
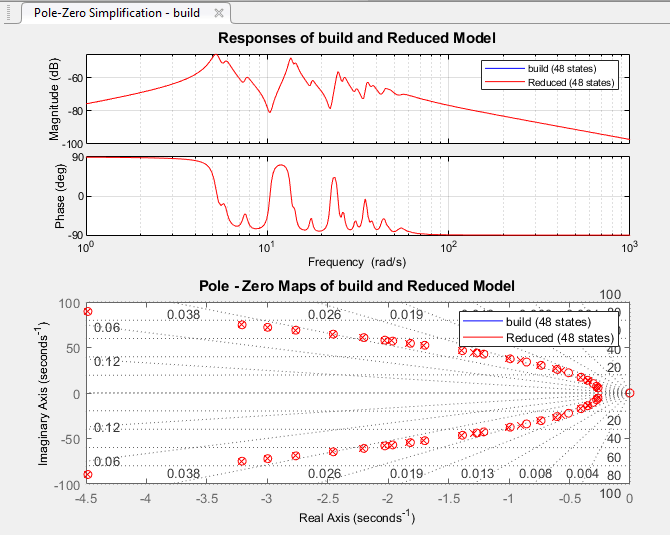
Нулевая полюсом карта отмечает местоположения полюса x и нулевые местоположения с o.
Примечание
Частотной характеристикой является Диаграмма Боде для моделей SISO и график сингулярного значения для моделей MIMO.
Опционально, измените допуск, с которым Model Reducer идентифицирует отменяющие нулевые полюсом пары. Model Reducer отменяет нулевые полюсом пары, которые находятся в пределах допуска, заданного значением Simplification of pole-zero pairs. В этом случае никакие нулевые полюсом пары не достаточно близки вместе для Model Reducer, чтобы отменить их в допуске по умолчанию 1e-05. Чтобы отменить пары, которые являются немного далее независимо, переместите ползунок направо или введите большее значение в текстовое поле.
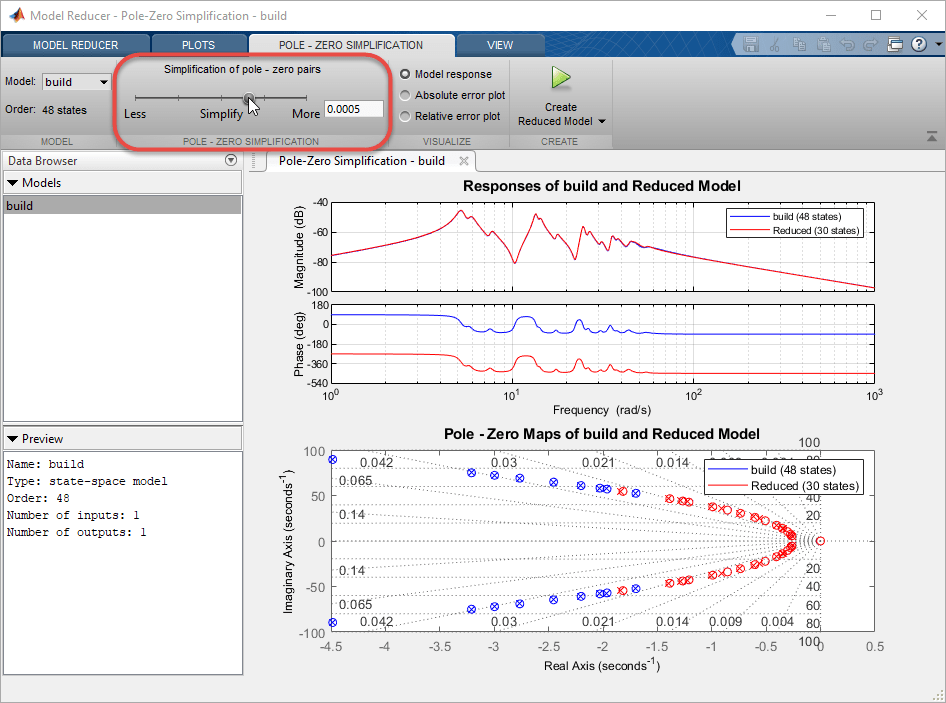
Синий x и o метки на нулевой полюсом карте показывают почти отменяющие нулевые полюсом пары в исходной модели, которые устраняются из упрощенной модели. Полюса и нули, остающиеся в упрощенной модели, отмечены красным x и o.
Попробуйте различные допуски упрощения при наблюдении частотной характеристики исходной и упрощенной модели. Удалите столько полюсов и нулей, сколько вы можете при сохранении поведения системы в области частоты, которая важна для приложения. Опционально, исследуйте абсолютную или относительную погрешность между исходной и упрощенной моделью. Выберите тип диаграммы погрешностей с помощью кнопок на вкладке Pole-Zero Simplification.
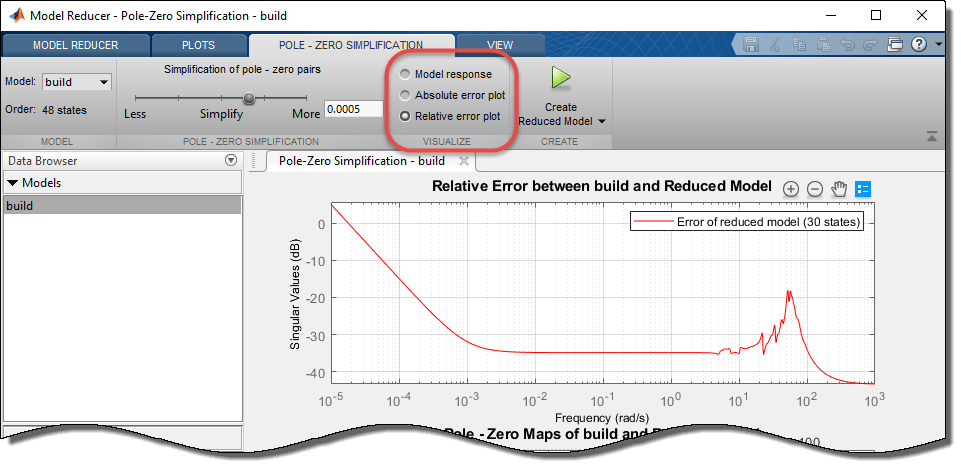
Для получения дополнительной информации об использовании графиков для анализа смотрите, Визуализируют Модели Уменьшаемого Порядка в Приложении Model Reducer.
Когда у вас есть упрощенная модель, которую вы хотите сохранить и анализировать далее, кликнуть![]() . Новая модель появляется в Data Browser с именем, которое отражает порядок упрощенной модели.
. Новая модель появляется в Data Browser с именем, которое отражает порядок упрощенной модели.
После создания упрощенной модели в Data Browser можно продолжить изменять параметры упрощения и создать упрощенные модели с различными порядками для анализа и сравнения.
Можно теперь выполнить последующий анализ с упрощенной моделью. Например:
Исследуйте другие ответы уменьшаемой системы, такие как график Николса или переходной процесс. Для этого используйте инструменты на вкладке Plots. Смотрите Визуализируют Модели Уменьшаемого Порядка в Приложении Model Reducer для получения дополнительной информации.
Экспортируйте упрощенные модели в рабочее пространство MATLAB для последующего анализа или системы управления. На вкладке Model Reducer нажмите![]() Export.
Export.
Чтобы создать скрипт MATLAB, можно использовать для дальнейших задач снижения сложности модели в командной строке, нажать Create Reduced Model и выбрать Generate MATLAB Script.
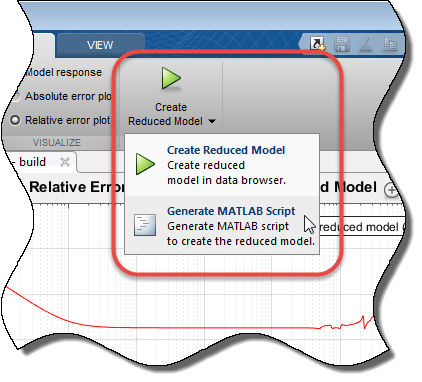
Model Reducer создает скрипт, который использует minreal команда, чтобы выполнить снижение сложности модели параметрами вы установили на вкладке Pole-Zero Simplification. Скрипт открывается в редакторе MATLAB.
Чтобы уменьшать порядок модели удалением нулей-полюсов в командной строке, используйте minreal.
Создайте модель следующей системы, где C ПИ-контроллер и G имеет нуль в рад/с. Такой низкочастотный нуль может явиться результатом производного действия где-нибудь в динамике объекта. Например, объект может включать компонент, который вычисляет скорость из измерений положения.

G = zpk(3e-8,[-1,-3],1); C = pid(1,0.3); T = feedback(G*C,1)
T =
(s+0.3) (s-3e-08)
----------------------
s (s+4.218) (s+0.7824)
Continuous-time zero/pole/gain model.
В модели T с обратной связью, интегратор от C очень почти отменяет низкочастотный нуль G.
Обеспечьте отмену интегратора с нулем около источника.
Tred = minreal(T,1e-7)
Tred =
(s+0.3)
--------------------
(s+4.218) (s+0.7824)
Continuous-time zero/pole/gain model.
По умолчанию, minreal уменьшает порядок передаточной функции путем отмены точных нулевых полюсом пар или около нулевых полюсом пар в sqrt(eps). Определение 1e-7 когда второй вход вызывает minreal устранить нулевые полюсом пары в rad/s друг друга.
Упрощенная модель Tred включает всю динамику исходной модели T с обратной связью, за исключением почти отменяющей нулевой полюсной пары.
Сравните частотные характеристики исходных и уменьшаемых систем.
bode(T,Tred,'r--') legend('T','Tred')

Поскольку отмененный полюс и нуль не соответствуют точно, некоторые экстремальные низкочастотные движущие силы, очевидные в исходной модели, отсутствуют в Tred. Во многих приложениях можно пропустить такую экстремальную низкочастотную динамику. Когда вы увеличиваете соответствующий допуск minreal, убедитесь, что вы не устраняете динамические функции, которые относятся к вашему приложению.
