Зубчатая передача с солнцем, планетой и кольцевыми механизмами
Simscape / Автомобильная трансмиссия / Механизмы

Блок Planetary Gear моделирует зубчатую передачу с солнцем, планетой и кольцевыми механизмами. Планетарные механизмы распространены в системах передачи, где они обеспечивают отношения разгара в компактных конфигурациях. Поставщик услуг, соединенный с карданным валом, содержит механизмы планеты. Порты C, R и S представляют валы, соединенные с поставщиком услуг механизма планеты, кольцевым механизмом и механизмом солнца.
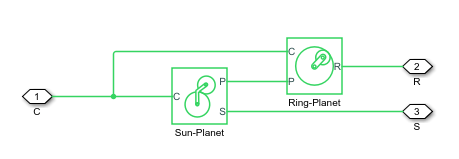
Блок моделирует планетарный механизм как структурное компонентно-ориентированное на Sun-Planet и блоках Simscape™ Driveline™ Ring-Planet. Рисунок показывает блок-схему этого структурного компонента.
Чтобы увеличить точность модели механизма, можно задать свойства, такие как инерция механизма, запутывающие потери и вязкие потери. По умолчанию инерция механизма и вязкие потери приняты, чтобы быть незначительными. Блок позволяет вам задать инерцию внутренних механизмов планеты. Чтобы смоделировать инерцию поставщика услуг, солнце и кольцевые механизмы, соединяют Simscape блоки Inertia с портами C, S и R.
Можно смоделировать эффекты теплового потока и изменения температуры путем включения дополнительного теплового порта. Чтобы включить порт, установите Friction model на Temperature-dependent efficiency.
Блок Planetary Gear налагает два кинематических и два геометрических ограничения,
где:
rC является радиусом механизма поставщика услуг.
ωC является скоростью вращения механизма поставщика услуг.
rS является радиусом механизма солнца.
ωS является скоростью вращения механизма солнца.
rP является радиусом механизма планеты.
ωp является скоростью вращения механизмов планеты.
rR является радиусом кольцевого механизма.
Передаточное отношение кольцевого солнца
где N является количеством зубов на каждом механизме.
В терминах этого отношения ключевое кинематическое ограничение:
Эти четыре степени свободы уменьшают до двух независимых степеней свободы. Пары механизма (1, 2) = (S, P) и (P, R).
Предупреждение
Передаточное отношение g RS должно строго быть больше того.
Передача крутящего момента
где:
τS является передачей крутящего момента для механизма солнца.
τR является передачей крутящего момента для кольцевого механизма.
τloss является потерей передачи крутящего момента.
В идеальном случае, где нет никакой потери крутящего момента, τloss = 0.
В неидеальном случае, τloss ≠ 0. Для получения дополнительной информации смотрите Механизмы Модели с Потерями.
Инерция механизма принята, чтобы быть незначительной.
Механизмы обработаны как твердые компоненты.
Трение Кулона замедляет симуляцию. Для получения дополнительной информации смотрите, Настраивают Точность Модели.
