Вы, возможно, должны обеспечить производные времени некоторых входных сигналов, особенно если вы используете явный решатель. Один способ обеспечить необходимые входные производные путем пропущения входа через фильтр lowpass. Введите фильтрацию, делает входной сигнал более сглаженным и обычно улучшает производительность модели. Дополнительная выгода - то, что механизм Simscape™ вычисляет производные времени отфильтрованного входа. Фильтр первого порядка обеспечивает одну производную, в то время как фильтр второго порядка обеспечивает первые и вторые производные. Если вы используете входную фильтрацию, очень важно выбрать соответствующее значение для постоянной времени фильтра.
Постоянная времени фильтра управляет фильтрацией входного сигнала. Отфильтрованный вход следует за истинным входом, но сглаживается с задержкой порядка постоянной времени, которую вы выбираете. Установите постоянную времени на значение, не больше, чем самый маленький временной интервал в системе, которая интересует вас. Если вы выбираете очень небольшую постоянную времени, отфильтрованный входной сигнал ближе к истинному входному сигналу. Однако этот отфильтрованный входной сигнал увеличивает жесткость системы и замедляет симуляцию.
Вместо того, чтобы использовать входную фильтрацию, можно обеспечить производные времени для входного сигнала непосредственно как дополнительные физические сигналы.
Для кусочно-постоянных сигналов можно также явным образом обнулить входные производные.
Можно управлять способом, которым вы обеспечиваете производные времени для каждого входного сигнала путем конфигурирования блока Simulink-PS Converter, соединенного с тем входным сигналом:
Откройте диалоговое окно блока Simulink-PS Converter.
Кликните по вкладке Input Handling.
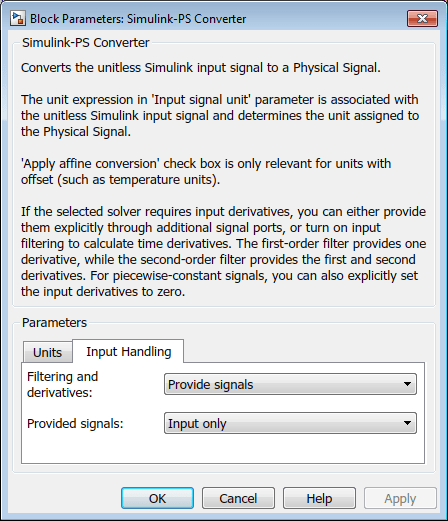
Когда вы добавляете новый блок Simulink-PS Converter в свою модель, входными опциями обработки по умолчанию является Provide signals и Input only, и блок имеет один входной порт Simulink® и один выходной порт физического сигнала.
Чтобы включить входную фильтрацию, установите параметр Filtering and derivatives на Filter input, derivatives calculated. Выберите фильтр второго порядка или первого порядка, при помощи параметра Input filtering order, и установите соответствующее значение параметров Input filtering time constant (in seconds) для вашей модели.
Чтобы постараться не фильтровать входной сигнал, сохраните параметр Filtering and derivatives как Provide signals. Затем установите значение параметров Provided signals:
Input and first derivative — Если вы выбираете эту опцию, дополнительный входной порт Simulink, кажется, на блоке Simulink-PS Converter, позволяет вам соединить входную производную обеспечения сигнала.
Input and first two derivatives — Если вы выбираете эту опцию, два дополнительных входных порта Simulink, кажется, на блоке Simulink-PS Converter, позволяют вам соединить сигналы, обеспечивающие входные производные.
Наконец, если ваш входной сигнал является кусочной константой (такой как шаг), можно также явным образом обнулить входные производные путем выбора Zero derivatives (piecewise constant) значение для параметра Filtering and derivatives.
