Номер и типы соединений, механизмов и ограничений в механизме частично определяют свою мобильность — общее количество степеней свободы или число степеней свободы, что механизм обеспечивает и поэтому минимальное количество входных переменных должно было полностью ограничить свою настройку. Мобильность F механизма с телами N и соединениями j, каждый с числом степеней свободы f следует из выражений, таких как критерий Kutzbach, который для плоского механизма утверждает:
Применение этого критерия к четырёхзвеннику, сборки из четырех тел (n = 4) и четырёх соединений (j = 4) с одной вращательной степенью свободы каждый (f i = 1), приводит к мобильности с одной степени свободы — что показывает, что одной входной переменной достаточно, чтобы полностью управлять конфигурацией механизма. Когда механизмы становятся сложнее, вычисление числа степеней свободы вручную становится более длительным процессом, но Simscape™ Multibody™ автоматически вычисляет их для вас.
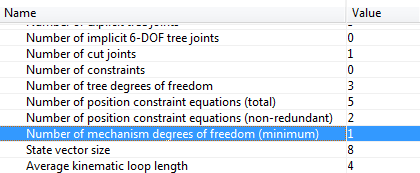
Можно просмотреть степени свободы механизма через Simscape Statistics Viewer, что показано ниже для известного примера четырёхзвенника. Откройте Statistics Viewer. В галерее Apps нажмите Simscape Variable Viewer. Введите sm_four_bar в командной строке MATLAB®, чтобы открыть модель четырёхзвенника и просмотреть ее число степеней свободы через Statistics Viewer.