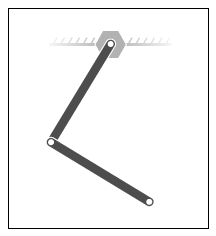
В этом примере показано, как смоделировать двойной маятник — простая кинематическая цепь, включающая два движущихся контактирующих тела, соединенные последовательно через два шарнирных соединения. Третье тело представляет механическую землю и жестко соединено к инерционной лабораторной системе координат. Пользовательский smdoc_compound_rigid_bodies библиотека обеспечивает блоки подсистемы тела, используемые в примере.
Блоки Revolute Joint позволяют вам смоделировать соединения, соединяющие смежные тела, и справка установила их начальные состояния. Программное обеспечение Simscape™ Multibody™ удовлетворяет объединенной цели состояния точно, если это кинематическим образом допустимо а не в конфликте с другими целями состояния. Параметр Priority позволяет вам задать который цели попытаться удовлетворить сначала.
Запустите новую модель.
Перетащите эти блоки в модель. Два блока Шарнирного соединения предоставляют двойному маятнику две вращательных степени свободы.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape> Utilities | Solver Configuration | 1 |
| Simscape> Multibody> Utilities | Mechanism Configuration | 1 |
| Simscape> Multibody> Frames and Transforms | World Frame | 1 |
| Simscape> Multibody> Joints | Revolute Joint | 2 |
В командной строке MATLAB® введите smdoc_compound_rigid_bodies. Библиотека пользовательского блока с тем же именем открывается.
Перетащите эти пользовательские блоки в модель. Каждый блок представляет тело в двойном маятнике.
| Блок | Количество |
|---|---|
| Центр монтируется | 1 |
| Бинарная ссылка A | 2 |
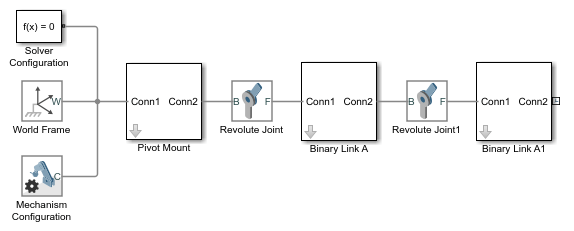
Соедините блоки как показано на рисунке.
В диалоговых окнах блока Revolute Joint выберите State Targets> Specify Position Target. Можно теперь задать желаемые стартовые позиции двух соединений.
В Value введите эти углы поворота шарнира.
| Имя блока | Значение (степени) |
|---|---|
| Шарнирное соединение | 30 |
| Вращательный Joint1 | -75 |
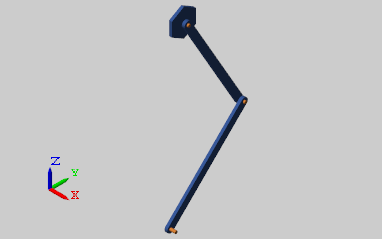
Чтобы визуализировать модель, обновите блок-схему. Во вкладке Modeling нажмите Update Model. Mechanics Explorer открывается 3-D представлением двойного блока маятника. Нажмите изометрическую кнопку представления, чтобы получить перспективу на рисунке.
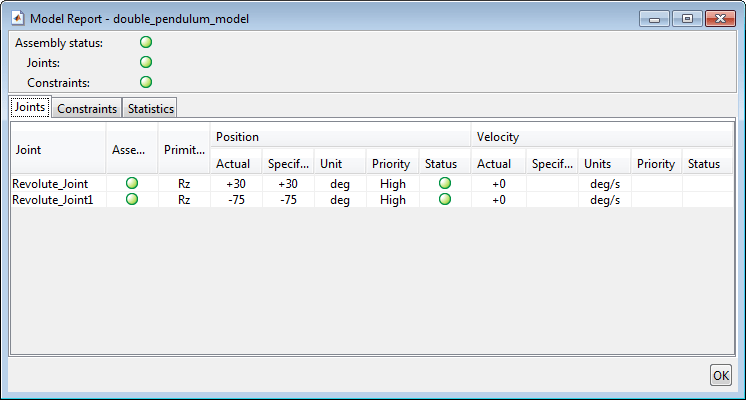
Чтобы проверять состояние блока шарнирных соединений, используйте утилиту Отчета Модели. Можно открыть эту утилиту из панели меню Mechanics Explorer путем выбора Tools> Model Report. Рисунок показывает информацию о блоке для двойного маятника.
Запустите симуляцию. Mechanics Explorer показывает 3-D анимацию двойного блока маятника. Блок перемещается из-за силы тяжести, заданной в Блоке Configuration Механизма.
Чтобы видеть полную модель двойного блока маятника, в командной строке MATLAB, войдите:
smdoc_double_pendulum
