Инерция является основным атрибутом чего-либо, что вы можете толковать как тело. Это - сопротивление изменению в состоянии движения, и, эквивалентно, мера силы или крутящего момента должна была вызвать определенное ускорение. В отличие от других твердых атрибутов, таких как геометрия или цвет, это строго требуется для симуляции модели. В частности, концы соединения — его системы координат — должны каждый соединиться с инерцией, которая должна сказать, что, где движение позволено, там должен существовать инерция для приложенной силы или крутящего момента, чтобы реагировать.
Можно смоделировать элемент инерции в изоляции без намерения представлять тело. Такая инерция полезна, например, при симуляции колебаний, вызванных глыбой грязи на вращающемся автомобильном колесе. Глыба является отдельной от корпуса колеса, и можно смоделировать его как таковой. Кроме того, его геометрия и цвет являются в этом случае тривиальными деталями, и можно игнорировать их для моделирования целей. Таким образом, вы обрабатываете глыбу как простую инерцию — один недостаток в любых атрибутах кроме инерции.
Изолированная простая инерция является редкой в модели. Обычно вы объясняете инерцию в ходе моделирования полного тела — что-то с геометрией и цветом, как крыло в колеблющемся механизме крыла, обсужденном в Моделировании Тел. Вы начинаете с концепции тела, модель, что тело как набор твердых частиц, и задает атрибуты тех твердых частиц, чтобы получить полное представление тела. Твердые частицы являются вещами, которые вы моделируете и инерция просто один из их атрибутов.
Тело (1) и простая инерция (2)

Вы добавляете, что инерция к использованию модели блокируется от библиотеки Body Elements. Соответствующие блоки включают твердые блоки, Inertia и тех в подбиблиотеке Variable Mass. Можно смоделировать полное тело или простую инерцию. Или мог зафиксировать или переменные параметры инерции, хотя точная параметризация, и поэтому тип тела или инерции, зависят от блока. Термин “тело” используется здесь, чтобы обозначить элемент, атрибуты которого расширяют вне просто инерции и термина “инерция”, когда используется обратиться к элементу, тот, атрибуты которого охватывают только инерцию.
Фиксированные Твердые частицы. Используйте твердые блоки при моделировании твердых частиц и тел, которые они включают. Эти блоки позволяют вам задать геометрию и цвет, ключевые атрибуты, если серьезная визуализация важна для вас. Они также позволяют вам иметь менее доступные параметры вращательной инерции, автоматически вычисленной из геометрии тела и или массовая или массовая плотность. Даже в случаях, где геометрия и цвет являются лишними деталями, твердые блоки часто являются самыми удобными средними значениями определения инерции. Обратите внимание на то, что геометрия и параметры инерции твердых блоков являются строго постоянными. К твердым частицам модели с любым как переменный атрибут необходимо использовать блоки из подбиблиотеки Variable Mass.
Переменные Твердые частицы. Используйте твердые блоки в библиотеке Body Elements> Variable Mass к полным твердым частицам модели с переменными параметрами инерции, такими как масса и зависимые инерцией размерности, такие как длина и радиус, который может варьироваться динамически с входными параметрами инерции. Блоки, которые представляют твердые частицы, идентифицированы как таковые при наличии слова Тело на их имена — например, Variable Cylindrical Solid и Тело Variable Brick. Эти блоки отличаются от твердых блоков в родительской библиотеке, в которой могут измениться один или несколько параметров инерции, и от блока General Variable Mass в этом они обладают геометрией и цветом.
Фиксированная Инерция. Используйте блок Inertia в качестве средние значения корректировки инерции тела или тела. Геометрия и цвет рассматриваются не важными для моделирования целей. Можно вычесть массу с учетом существования полой области, такой как пустой отсек в судне, первоначально смоделированном без одного. Можно также добавить массу с учетом присутствия маленьких воздействий, таких как глыбы грязи, которые иногда задерживаются на автомобильном колесе. Обратите внимание на то, что можно внести те же корректировки, иногда более интуитивно, с помощью более сложных твердых блоков.
Переменная Инерция. Зарезервируйте блок General Variable Mass для особых случаев, в которых масса, центр массы или тензор инерции должны измениться в ответ на некоторый вход — часто только само время — не делая предположения о геометрии тела. Можно смоделировать события, такие как выкапывание загрузки экскаватором типа обратная лопата (пример переменной массы), перемещение жителя на manlift (пример переменного центра массы), и хлюпание жидкой загрузки, содержавшейся в автоцистерне (пример переменного тензора инерции).
Твердые блоки имеют доступ к данным о геометрии и могут поэтому вычислить параметры инерции, учитывая форму и массу. Эта функция значительно сокращает количество параметров, которые необходимо задать в модели. Автоматическое вычисление инерции всегда включается в переменных твердых блоках, таких как Variable Cylindrical Solid и Variable Cylindrical Brick. Это включено по умолчанию в твердых блоках, означая, что можно изменить эти настройки.
Можно также задать параметры инерции явным образом, например, чтобы точно получить инерцию тела, для которого у вас есть только грубая геометрия. Примером является ссылка нечетной формы, например, одна типичная из руки экскаватора типа обратная лопата, что вы аппроксимировали использование простой формы блока Brick Solid. Геометрия тела в этом случае не очень точна, и можно предпочесть задавать параметры инерции с помощью CAD (или другой) данные.
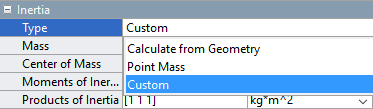
Если вы принимаете решение задать инерцию явным образом, существует две параметризации, которую можно использовать. Каждый позволяет вам обработать тело или инерцию как масса точки: Point Mass параметризация. Другой позволяет вам обработать тело или инерцию как распределенная масса: Custom параметризация. Можно выбрать опцию, подходящую лучше всего для приложения с помощью выпадающего списка Inertia> Type.
Обратите внимание на то, что Point Mass и Custom параметризация доступна только в тех блоках, которые поддерживают явную спецификацию инерции. Переменные твердые блоки в библиотеке Body Elements> Variable Mass не обеспечивают также. В тех блоках центр массы и тензора инерции строго ограничивается к геометрии тела и плотности и, поэтому, всегда автоматически вычисляется в процессе моделирования.
Point Mass Приближение. Масса точки является приближением, которое имеет как его единственные инерционные параметры центр массы и общей массы — мера поступательной инерции и поэтому сопротивления внезапному изменению в поступательной скорости. Вращательная инерция принята незначительная и проигнорирована. Местоположение центра массы может меняться в зависимости от уважения до начала координат системы координат локальной ссылки.

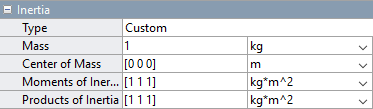
Custom Массовые Распределения. Распределенная масса является более общим представлением инерции. Это имеет среди его инерционных параметров не только общую массу и центр массы, но также и моменты инерции и продукты инерции. Моменты и продукты инерции включают то, что известно как тензор инерции или матрицу. Вместе, эти параметры достаточны, чтобы полностью описать, с точки зрения моделирования мультитела, распределения массы на пробеле.
Примечание по Объединенным Связям. Соблюдите осторожность при соединении инерции с нулевыми моментами инерции, такими как массы точки, к соединениям с вращательными степенями свободы — составленные, по крайней мере, в части вращательных или сферических объединенных примитивов. Объединенный момент инерции о вращательных осях соединения должен быть ненулевым на каждой стороне. Причина этого проста: угловое ускорение об оси становится бесконечным независимо от крутящего момента, примененного, если моментом инерции о той оси является нуль. Это поведение не является физическим и запрещено в модели.
Блоки в библиотеке Body Elements имеют порты системы координат, которые вы соединяете, чтобы разрешить размещение соответствующих элементов — твердых частиц, инерции — в контексте модели. Системы координат являются твердой частью тех элементов и естественно перемещаются с ними как модуль. Они используются, прямо или косвенно, чтобы задать инерцию и, в твердых частицах, конфигурациях элементов.
Если концепция системы координат является внешней вам, смотрите Работу с Системами координат. Кратко, система координат является триадой оси во многом как Декартова система координат. Это имеет положение и ориентацию, что можно задать использование интерфейса создания системы координат блока Solid или параметров блока Rigid Transform. Все положения и ориентации в модели — твердых частиц, инерции, соединений и ограничений, сил и крутящих моментов, датчиков — заданы через системы координат.
Система координат тела
Можно визуализировать твердые частицы и инерцию в модели. Тип визуализации, которую вы получаете, зависит от блока, который вы используете. Твердые блоки, включая тех от библиотеки Body Elements> Variable Mass, позволяют вам визуализировать свои соответствующие элементы с помощью конфигураций, которые вы задаете. Можно также визуализировать тело с помощью простого графического маркера, такого как сфера — например, чтобы подсветить ее положение в случаях, где геометрия, как известно, неточна.
Инерция испытывает недостаток в геометрии и окрашивает и естественно не поддерживает основанную на геометрии визуализацию. Необходимо визуализировать такие элементы с помощью альтернативных средних значений. Если элемент сопоставлен с блоком General Variable Mass, можно использовать те же графические маркеры, обеспеченные в твердых блоках или эквивалентном эллипсоиде инерции — форма, размерности которой зависят непосредственно от параметров инерции, которые вы задаете. Если элемент сопоставлен с блоком Inertia, можно использовать маркеры твердых блоков или значка инерции.
Для получения дополнительной информации о визуализации смотрите, Визуализируют Модель и Ее Компоненты.
Добавьте, что плоскость зафиксировала инерцию к модели двойного маятника, расположите его в свободном конце внешней ссылки и установите ее массу на 25 г с помощью Point Mass параметризация:
В командной строке MATLAB введите smdoc_double_pendulum. Модель двойного маятника открывается. В нем три блока Подсистемы Simulink, каждый представляющий тело. Сохраните модель под другим именем в удобной папке.
От библиотеки Body Elements добавьте блок Inertia и соединитесь, его порт системы координат (пометил R) к самому правому порту системы координат Binary Link A1 блок. Система координат, сопоставленная с этим портом, расположена в свободном конце двойного маятника.
В диалоговом окне блока Inertia, установленном Массовый параметр на 25 g— значение, примерно эквивалентное четверти массы бинарной ссылки (130 g). Point Mass параметризация в этом блоке позволяет вам проигнорировать вращательные параметры инерции.
Симулируйте модель. Mechanics Explorer открывается динамической визуализацией вашего обновленного двойного маятника. Заметьте, что значок инерции раньше обозначал местоположение вашего элемента инерции.

См., “Пробуют Его: Задайте Пользовательскую Инерцию” для примера, показывающего, как задать параметры Пользовательской инерции.
Когда твердые формы растут в сложности, параметры инерции становятся все больше громоздкими, чтобы задать, и другой подход может подойти вам лучше: соединение. Можно забеременеть комплексного тела или инерции как набор более простых элементов и задать их параметры инерции явным образом, при использовании блока Inertia или General Variable Mass, или сконфигурировать их для автоматического вычисления при использовании твердого блока.
Когда вы твердо соединяете более простые элементы — через линии связи и, в случае необходимости, блоки Rigid Transform — вы получаете агрегат, свойства инерции которого зеркально отражают те из комплексного тела или инерции, которую вы намеревались представлять. Бинарная ссылка показанные на рисунке подачи как пример. Можно разделить ссылку на три раздела, представлять каждый раздел с помощью отдельного блока и соединить соответствующие системы координат с помощью соответствующих твердых преобразований.
![]()
Для примера, показывающего, как задать геометрию бинарной ссылки посредством соединения, смотрите Попытку Это: Создайте Составную Геометрию.
Нет никакого требования в среде Simscape Multibody что параметры инерции быть положительным. Это включает массу и моменты инерции, оба параметра, которые в материальном мире строго положительны. Отрицательная инерция позволяет вам смоделировать составную инерцию с полыми разделами вычитанием и поэтому полезна в определенных моделях.
Бинарная ссылка снова служит примером. Можно представлять ссылку как одну часть без отверстий с помощью одного блока и вычесть из его концов инерцию отверстий с помощью дополнительных блоков. Как прежде, необходимо использовать твердые преобразования, чтобы правильно расположить системы координат инерции друг относительно друга.
![]()
Для примера, показывая, как задать инерцию путем соединения, смотрите Попытку Она: Создайте Составную Инерцию.
