Динамика модели трехфазной асинхронной машины, также известной как асинхронную машину, в SI или pu модулях
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
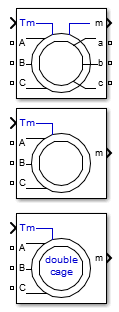
Asynchronous Machine SI Units и блоки Asynchronous Machine pu Units реализуют трехфазную асинхронную машину (ротор раны, клетка для белок, или удваивают клетку для белок), смоделированный в выбираемой системе координат dq (ротор, статор, или синхронный). Статор и обмотки ротора соединяются в Уае с внутренней нейтральной точкой. Блок действует или в генераторе или в моторном режиме. Режим работы диктует знак механического крутящего момента:
Если Tm положителен, действия машины как двигатель.
Если Tm отрицателен, действия машины как генератор.
Электрическая часть машины представлена четвертым порядком (или шестым порядком для двойной машины клетки белки) модель в пространстве состояний и механическая деталь системой второго порядка. Все электрические переменные и параметры отнесены в статор, который обозначается главными знаками в следующих уравнениях машины. Весь статор и количества ротора находятся в произвольной системе координат 2D оси (система координат dq). Используемые индексы заданы в этой таблице.
Индекс | Определение |
|---|---|
d | d- количество оси |
q | q- количество оси |
r | Количество ротора (ротор раны или одно клетка) |
r1 | Клетка 1 количество ротора (двойная клетка) |
r2 | Клетка 2 количества ротора (двойная клетка) |
s | Количество статора |
l | Индуктивность утечки |
m | Намагничивание индуктивности |
V qs = R siqs + d φ qs/dt + ω φ ds
V ds = R sids + d φ ds/dt – ω φ qs
V' qr = R' ri'qr + d φ' qr/dt + (ω – ω r) φ' доктор
V' доктор = R' ri'dr + d φ' dr/dt – (ω – ω r) φ' qr
T e = 1.5p (φ dsiqs – φ qsids)
ω — Скорость вращения системы координат
ω r — Электрическая скорость вращения
φ qs = L siqs + L mi'qr
φ ds = L sids + L mi'dr
φ' qr = L' ri'qr + L miqs
φ' доктор = L' ri'dr + L mids
L s = L ls + L m
L' r = L' lr + L m
V qs = R siqs + d φ qs/dt + ω φ ds
V ds = R sids + d φ ds/dt – ω φ qs
0 = R' r1i'qr1 + d φ' qr1/dt + (ω – ω r) φ' dr1
0 = R' r1i'dr1 + d φ' dr1/dt – (ω – ω r) φ' qr1
0 = R' r2i'qr2 + d φ' qr2/dt + (ω – ω r) φ' dr2
0 = R' r2i'dr2 + d φ' dr2/dt – (ω – ω r) φ' qr2
T e = 1.5p (φ dsiqs – φ qsids)
φ qs = L siqs + L m (i' qr1 + i' qr2)
φ ds = L sids + L m (i' dr1 + i' dr2)
φ' qr1 = L' r1i'qr1 + L miqs
φ' dr1 = L' r1i'dr1 + L mids
φ' qr2 = L' r2i'qr2 + L miqs
φ' dr2 = L' r2i'dr2 + L mids
L s = L ls + L m
L' r1 = L' lr1 + L m
L' r2 = L' lr2 + L m
Параметры блоков Asynchronous Machine заданы в таблице. Все количества отнесены в статор.
Параметры, характерные для всех моделей | Определение |
|---|---|
R s, L ls | Сопротивление статора и индуктивность утечки |
L m | Намагничивание индуктивности |
Ls | Общая индуктивность статора |
V qs, i qs | q- напряжение статора оси и текущий |
V ds, i ds | d- напряжение статора оси и текущий |
ϕ qs, ϕ ϕds | Статор q - ось и d - потоки оси |
ω m | Скорость вращения ротора |
Θ m | Угловое положение ротора |
p | Количество пар полюсов |
ω r | Электрическая скорость вращения (ωm × p) |
Θ r | Электрическое угловое положение ротора (Θm × p) |
Te | Электромагнитный крутящий момент |
T m | Крутящий момент механического устройства вала |
J | Объединенный ротор и коэффициент инерции загрузки. Установите на большое количество, чтобы симулировать заблокированный ротор. |
H | Объединенный ротор и постоянная инерция загрузки. Установите на большое количество, чтобы симулировать заблокированный ротор. |
F | Объединенный ротор и коэффициент вязкого трения загрузки |
Параметры, характерные для ротора Одно Клетки или раны | Определение |
|---|---|
L'r | Общая индуктивность ротора |
R'r, L'lr | Сопротивление ротора и индуктивность утечки |
V'qr, i'qr | q- напряжение ротора оси и текущий |
V'dr, i'dr | d- напряжение ротора оси и текущий |
ϕ'qr, ϕ'dr | Ротор q - ось и d потоки оси |
Параметры, характерные для ротора Двойной Клетки | Определение |
|---|---|
R'r1, L'lr1 | Сопротивление ротора и индуктивность утечки клетки 1 |
R'r2, L'lr2 | Сопротивление ротора и индуктивность утечки клетки 2 |
L'r1, L'r2 | Общая индуктивность ротора клетки 1 и 2 |
i'qr1, i'qr2 | q- ротор оси, текущий из клетки 1 и 2 |
i'dr1, i'dr2 | d- ротор оси, текущий из клетки 1 и 2 |
ϕ'qr1, ϕ'dr1 | q - ось и d - потоки ротора оси клетки 1 |
ϕ'qr2, ϕ'dr2 | q - ось и d - потоки ротора оси клетки 2 |
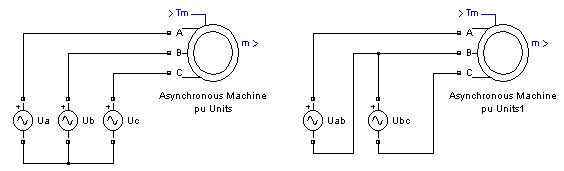
Блоки Asynchronous Machine не включают представление насыщения потоков утечки. Будьте осторожны, когда вы соедините идеальные источники со статором машины. Если вы принимаете решение предоставить статор через трехфазное, Y-connected бесконечный источник напряжения, необходимо использовать три источника, соединенные в Y. Однако, если вы принимаете решение симулировать исходную связь дельты, необходимо использовать только два источника, соединенные последовательно.
Когда вы используете блоки Asynchronous Machine в дискретных системах, вам придется соединить маленькую паразитную активную нагрузку на терминалах машины, чтобы избежать числовых колебаний. Времена большой выборки требуют больших загрузок. Оптимальная активная нагрузка пропорциональна шагу расчета. С 25 μs временными шагами в системе на 60 Гц минимальная нагрузка составляет приблизительно 2,5% степени номинала машины. Например, 200 асинхронных машин MVA в энергосистеме, дискретизированной с 50 μs шагами расчета, требуют приблизительно 5% активной нагрузки или 10 МВт. Если шаг расчета уменьшается до 20 μs, активная нагрузка 4 МВт достаточна.
Терминалы статора блоков Asynchronous Machine идентифицированы буквами A, B и C. Терминалы ротора идентифицированы буквами a, b и c. Нейтральные связи статора и обмоток ротора не доступны. Приняты трехпроводные связи Y.
Rotor type — Тип ротораWound | Squirrel-cage | Double squirrel-cageТип ротора. Для блока Asynchronous Machine SI Units значением по умолчанию является Wound. Для блока Asynchronous Machine pu Units значением по умолчанию является Squirrel-cage.
Squirrel-cage preset model — Электрические и механические параметрыNo (значение по умолчанию) | 01: 5 HP 460 V 60Hz 1750 RPM | 02: 10 HP 460 V 60Hz 1760 RPM | ...Набор предопределенных электрических и механических параметров для различных асинхронных оценок машины степени (HP), напряжение от фазы к фазе (V), частота (Гц) и оцененная скорость (об/мин) для одной машин клетки белки.
Выберите одну из предварительно установленных моделей, чтобы загрузить соответствующие электрические и механические параметры. Предварительно установленные модели не включают предопределенные параметры насыщения. Выбор:
01: 5 HP 460 V 60Hz 1750 RPM
02: 10 HP 460 V 60Hz 1760 RPM
03: 20 HP 460 V 60Hz 1760 RPM
04: 50 HP 460 V 60Hz 1780 RPM
05: 100 HP 460 V 60Hz 1780 RPM
06: 150 HP 460 V 60Hz 1785 RPM
07: 200 HP 460 V 60Hz 1785 RPM
08: 5 HP 575 V 60Hz 1750 RPM
09: 10 HP 575 V 60Hz 1760 RPM
10: 20 HP 575 V 60Hz 1765 RPM
11: 50 HP 575 V 60Hz 1775 RPM
12: 100 HP 575 V 60Hz 1780 RPM
13: 150 HP 575 V 60Hz 1785 RPM
14: 200 HP 575 V 60Hz 1785 RPM
15: 5.4 HP (4KW) 400 V 50Hz 1430 RPM
16: 10 HP (7.5KW) 400 V 50Hz 1440 RPM
17: 20 HP (15KW) 400 V 50Hz 1460 RPM
18: 50 HP (37KW) 400 V 50Hz 1480 RPM
19: 100 HP (75KW) 400 V 50Hz 1484 RPM
20: 150 HP (110KW) 400 V 50Hz 1487 RPM
21: 215 HP (160KW) 400 V 50Hz 1487 RPM
Выберите No если вы не хотите использовать предварительно установленную модель, или если вы хотите изменить некоторые параметры предварительно установленной модели.
Когда вы выбираете предварительно установленную модель, электрические и механические параметры во вкладке Parameters недоступны. Начать с предварительно установленной модели и затем изменить параметры машины:
Выберите предварительно установленную модель, для которой вы хотите инициализировать параметры.
Измените параметр Preset model в No. Это действие не изменяет параметры машины, но повреждает связь с предварительно установленной моделью.
Измените параметры машины, как вы хотите.
Чтобы включить этот параметр, установите Rotor type на Squirrel-cage.
Double squirrel-cage preset model — Задайте моделиНажмите Open parameter estimator, чтобы открыть интерфейс для power_AsynchronousMachineParams функция, которая предоставляет вам доступ, чтобы задать модели для двойной клетки асинхронные машины.
Mechanical input — Механический входTorque Tm (значение по умолчанию) | Speed w | Mechanical rotational portПредставлять ли крутящий момент, применился к валу или скорости ротора как вход Simulink® блока, или представлять вал машины Simscape™ вращательный механический порт.
Выберите Torque Tm задавать вход крутящего момента, в N.m или в pu, и и осушать порт Tm. Скорость машины определяется инерцией машины J (для машины SI) или инерцией постоянный H (для pu машины) и различием между прикладным механическим крутящим моментом Tm, и внутренним электромагнитным крутящим моментом, Te. Когда скорость положительна, положительный сигнал крутящего момента указывает на моторный режим, и отрицательный сигнал указывает на режим генератора.
Выберите Speed w задавать вход скорости, в rad/s или в pu, и осушать порт w. Скорость машины наложена, и механическая деталь модели (инерция машины J) проигнорирована. Используя скорость, когда механический вход позволяет вам моделировать механическое устройство, связывающееся между двумя машинами.
Фигура указывает, как смоделировать жесткое соединение вала в моторной генераторной установке, когда момент трения проигнорирован в машине 2. Выход скорости машины 1 (двигатель) соединяется с входом скорости машины 2 (генератор), в то время как машина 2 электромагнитных крутящих момента выход Te применяется к механическому входу Tm крутящего момента машины 1. Фактор Kw учитывает единицы скорости обеих машин (rad/s или pu) и отношение коробки передач w2/w1. Фактор KT учитывает модули крутящего момента обеих машин (N.m или pu) и оценки машины. Кроме того, потому что инерция, J2 проигнорирован в машине 2, J2, относится к скорости машины 1 и должна быть добавлена, чтобы обработать 1 инерцию машинным способом J1.
Выберите Mechanical rotational port осушать порт вращательного механического устройства Simscape, S, который позволяет вам соединять вал машины с другими блоками Simscape, которые имеют порты вращательного механического устройства.
Фигура указывает, как соединить блок Ideal Torque Source с библиотеки Simscape на вал машины, чтобы представлять машину в моторном режиме или в режиме генератора, когда скорость ротора положительна.
Reference frame — Система координат для преобразованияRotor (значение по умолчанию) | Stationary | SynchronousСистема координат, которая используется, чтобы преобразовать входные напряжения (система координат abc) к dq системе координат и вывести токи (dq система координат) к системе координат abc. Выберите из следующих преобразований системы координат:
Rotor Преобразование Парка
Stationary — Кларк или αβ преобразование
Synchronous
Следующие отношения описывают abc-to-dq преобразования системы координат, применился к асинхронным напряжениям от фазы к фазе машины.
В предыдущих уравнениях Θ является угловым положением системы координат, в то время как β = θ – θr является различием между положением системы координат и положением (электрическим) из ротора. Поскольку обмотки машины соединяются в трехпроводной настройке Y, нет никакого униполярного (0) компонент. Эта настройка также выравнивает по ширине те два от линии к линии, входные напряжения используются в модели вместо трех фазных напряжений. Следующие отношения описывают dq к abc преобразования системы координат, применился к асинхронным токам фазы машины.
Таблица показывает значения, принявшие Θ, и β в каждой системе координат (Θe положение синхронно вращающейся системы координат).
Система координат | Θ | β |
|---|---|---|
Ротор | Θr | 0 |
Стационарный | 0 | −Θr |
Синхронный | Θe | Θe − Θr |
Выбор системы координат влияет на формы волны всех dq переменных. Это также влияет на скорость симуляции, и в определенных случаях, точности результатов. Следующие инструкции предлагаются в [1]:
Используйте стационарную систему координат, если напряжения статора являются или несбалансированными или прерывистыми, и напряжения ротора сбалансированы (или 0).
Используйте систему координат ротора, если напряжения ротора являются или несбалансированными или прерывистыми, и напряжения статора сбалансированы.
Используйте или стационарные или синхронные системы координат, если все напряжения сбалансированы и непрерывны.
В следующих ситуациях параметр Reference frame не доступен для редактирования и устанавливается внутренне:
| Установка блока powergui | Установка блока Asynchronous Machine | Параметр Reference frame |
|---|---|---|
Simulation type установлен в Phasor или Discrete Phasor | — | Synchronous |
Simulation type установлен в Discrete и параметр Automatically handle Discrete solver and Advanced tab solver settings of blocks выбран | — | Rotor |
Simulation type установлен в Discrete
| Discrete solver model установлен в Trapezoidal robust или Backward Euler robust | Rotor |
Чтобы включить этот параметр, в блоке powergui, устанавливают Simulation type на Continuous или Discrete и очистите Automatically handle Discrete solver and Advanced tab solver settings of blocks. Кроме того, на вкладке Advanced, набор Discrete solver model к Trapezoidal non iterative или Trapezoidal iterative (alg. loop).
Use signal names to identify bus labels — Как идентифицировать метки шиныoff (значение по умолчанию) | onКогда этот флажок устанавливается, измерение, выход использует имена сигнала, чтобы идентифицировать метки шины. Выберите эту опцию для приложений, которые требуют, чтобы метки сигнала шины имели только алфавитно-цифровые символы.
Когда этот флажок снимается, измерение, выход использует определение сигнала, чтобы идентифицировать метки шины. Метки содержат неалфавитно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink.
Совет
Эта вкладка содержит электрические параметры машины. Чтобы оценить электрические параметры двойной клетки асинхронная машина на основе стандартных технических требований производителя, используйте power_AsynchronousMachineParams функция.
Nominal power, voltage (line-line), and frequency [ Pn(VA),Vn(Vrms),fn(Hz) ] — Номинальная степень, напряжение и частота[1.845e+04 400 50] (значение по умолчанию) | трехэлементный векторНоминальная полная мощность Pn (ВА), линия к линейному напряжению RMS Vn (V) и частота fn (Гц).
Vrotor/Vstator voltage ratio — Отношение напряженияОтношение напряжения Vrotor/Vstator ротора раны асинхронная машина, когда ротор в бездействии. Определение этого параметра позволяет вам получать желаемое напряжение ротора, не соединяя трансформатор на терминалах ротора.
Чтобы включить этот параметр, во вкладке Configuration, устанавливают Rotor type на Wound.
Stator resistance and inductance[ Rs(ohm) Lls(H) ] — Сопротивление статора и индуктивность утечкиСопротивление статора Rs (Ω) и индуктивность утечки Lls (H).
Rotor resistance and inductance [ Rr'(ohm) Llr'(H) ] — Сопротивление ротора и индуктивность утечкиСопротивление ротора Rr' (Ω) и индуктивность утечки Llr' (H), оба упомянули статор.
Чтобы включить этот параметр, во вкладке Configuration, устанавливают Rotor type на Wound или Squirrel-cage.
Cage 1 resistance and inductance [ Rr1' (ohm) Llr1' (H) ] — Сопротивление ротора и индуктивность утечкиСопротивление ротора Rr1' (Ω) и индуктивность утечки Llr1' (H), оба упомянули статор.
Чтобы включить этот параметр, во вкладке Configuration, устанавливают Rotor type на Double squirrel-cage.
Cage 2 resistance and inductance [ Rr2' (ohm) Llr2' (H) ] — Сопротивление ротора и индуктивность утечкиСопротивление ротора Rr2' (Ω) и индуктивность утечки Llr2' (H), оба упомянули статор.
Чтобы включить этот параметр, во вкладке Configuration, устанавливают Rotor type на Double squirrel-cage.
Mutual inductance Lm (H) — Намагничивание индуктивностиНамагничивание индуктивности Lm (H).
Inertia, friction factor, pole pairs [ J(kg.m^2) F(N.m.s) p() ] — Инерция, коэффициент трения, подпирает пары шестамиОбъединенная машина и коэффициент инерции загрузки J (kg.m2), объединенный коэффициент вязкого трения F (N.m.s) и пары полюса p. Момент трения Tf пропорционален скорости ротора ω, (Tf = F.ω). Tf описывается в N.m, F в N.m.s и ω в rad/s.
Initial conditions — Начальный промах s, электрический угол, статор текущая величина, углы фазы, ротор текущая величина и углы фазыНачальный промах s, электрический угол Θe (степени), статор текущая величина (A) и углы фазы (степени):
[slip, th, ias, ibs, ics, phaseas, phasebs, phasecs]
Если параметр Rotor type (во вкладке Configuration) устанавливается на Wound, можно также задать дополнительные начальные значения для ротора текущая величина (A) и углы фазы (степени):
[slip, th, ias, ibs, ics, phaseas, phasebs, phasecs, iar, ibr, icr, phasear, phasebr, phasecr]
Когда параметр Rotor type (во вкладке Configuration) устанавливается на Squirrel-cage, начальные условия могут быть вычислены инструментом Load Flow или инструментом Machine Initialization в блоке powergui.
Simulate saturation — Симулируйте магнитное насыщениеoff (значение по умолчанию) | onСимулировать ли магнитное насыщение железа статора и ротора.
Установите этот флажок, чтобы обеспечить матрицу параметров для симуляции насыщения.
Снимите этот флажок к не насыщение модели в вашей симуляции. В этом случае отношение между текущим статором и напряжением статора линейно.
[ i(Arms) ; v(VLL rms)] — Параметры кривой насыщения без загрузокПараметры кривой насыщения без загрузок. Магнитное насыщение статора и железа ротора (насыщение взаимного потока) моделируется кусочным определением линейного соотношения точки кривой насыщения без загрузок. Первая строка этой матрицы содержит значения токов статора. Вторая строка содержит значения соответствующих терминальных напряжений (напряжения статора). Первая точка (первый столбец матрицы) должна отличаться от [0,0]. Эта точка соответствует точке, где эффект насыщения начинается.
Нажмите Plot, чтобы просмотреть заданную кривую насыщения без загрузок.
Чтобы включить этот параметр, выберите Simulate saturation.
Совет
Эта вкладка содержит электрические параметры машины. Чтобы оценить электрические параметры двойной клетки асинхронная машина на основе стандартных технических требований производителя, используйте power_AsynchronousMachineParams функция.
Nominal power, voltage (line-line), and frequency [ Pn(VA),Vn(Vrms),fn(Hz) ] — Номинальная степень, напряжение и частотаНоминальная полная мощность Pn (ВА), линия к линейному напряжению RMS Vn (V) и частота fn (Гц).
Vrotor/Vstator voltage ratio — Отношение напряженияОтношение напряжения Vrotor/Vstator ротора раны асинхронная машина, когда ротор в бездействии. Определение этого параметра позволяет вам получать желаемое напряжение ротора, не соединяя трансформатор на терминалах ротора.
Чтобы включить этот параметр, во вкладке Configuration, устанавливают Rotor type на Wound.
Stator resistance and inductance [ Rs,Lls ] (pu) — Сопротивление статора и индуктивность утечкиСопротивление статора Rs (pu) и индуктивность утечки Lls (pu).
Rotor resistance and inductance [ Rr',Llr' ] (pu) — Сопротивление ротора и индуктивность утечкиСопротивление ротора Rr' (pu) и индуктивность утечки Llr' (pu), оба упомянули статор.
Чтобы включить этот параметр, во вкладке Configuration, устанавливают Rotor type на Wound или Squirrel-cage.
Cage 1 resistance and inductance [ Rr1',Llr1' ] (pu) — Сопротивление ротора и индуктивность утечкиСопротивление ротора Rr1' (pu) и индуктивность утечки Llr1' (pu), оба упомянули статор.
Чтобы включить этот параметр, во вкладке Configuration, устанавливают Rotor type на Double squirrel-cage.
Cage 2 resistance and inductance [ Rr2',Llr2' ] (pu) — Сопротивление ротора и индуктивность утечкиСопротивление ротора Rr2' (pu) и индуктивность утечки Llr2' (pu), оба упомянули статор.
Чтобы включить этот параметр, во вкладке Configuration, устанавливают Rotor type на Double squirrel-cage.
Mutual inductance Lm (pu) — Намагничивание индуктивностиНамагничивание индуктивности Lm (pu).
Inertia constant, friction factor, pole pairs [ H(s) F(pu) p() ] — Постоянная инерция, коэффициент трения, подпирает пары шестамиИнерция постоянный H, объединенный коэффициент вязкого трения F (pu) и пары полюса p.
Initial conditions — Начальный промах s, электрический угол, статор текущая величина, углы фазы, ротор текущая величина и углы фазыНачальный промах s, электрический угол Θe (степени), статор текущая величина (pu) и углы фазы (степени):
[slip, th, ias, ibs, ics, phaseas, phasebs, phasecs]
Если параметр Rotor type (во вкладке Configuration) устанавливается на Wound, можно также задать дополнительные начальные значения для ротора текущая величина (pu) и углы фазы (степени):
[slip, th, ias, ibs, ics, phaseas, phasebs, phasecs, iar, ibr, icr, phasear, phasebr, phasecr]
Когда параметр Rotor type (во вкладке Configuration) устанавливается на Squirrel-cage, начальные условия могут быть вычислены инструментом Load Flow или инструментом Machine Initialization в блоке powergui.
Simulate saturation — Симулируйте магнитное насыщениеoff (значение по умолчанию) | onСимулировать ли магнитное насыщение железа статора и ротора.
Установите этот флажок, чтобы обеспечить матрицу параметров для симуляции насыщения.
Снимите этот флажок к не насыщение модели в вашей симуляции. В этом случае отношение между текущим статором и напряжением статора линейно.
[ i; v] (pu) — Параметры кривой насыщения без загрузокПараметры кривой насыщения без загрузок. Магнитное насыщение статора и железа ротора (насыщение взаимного потока) моделируется кусочным определением линейного соотношения точки кривой насыщения без загрузок. Первая строка этой матрицы содержит значения токов статора. Вторая строка содержит значения соответствующих терминальных напряжений (напряжения статора). Первая точка (первый столбец матрицы) должна отличаться от [0,0]. Эта точка соответствует точке, где эффект насыщения начинается.
Нажмите Plot, чтобы просмотреть заданную кривую насыщения без загрузок.
Чтобы включить этот параметр, выберите Simulate saturation.
Чтобы включить вкладку Advanced, в блоке powergui, устанавливают Simulation type на Discrete и очистите Automatically handle Discrete solver and Advanced tab solver settings of blocks.
Sample time (-1 for inherited) — Шаг расчета для блокаШаг расчета используется блоком. Чтобы наследовать шаг расчета, заданный в блоке powergui, установите этот параметр на –1.
Discrete solver model — Метод интегрированияTrapezoidal non iterative (значение по умолчанию) | Trapezoidal iterative (alg. loop) | Trapezoidal robust | Backward Euler robustМетод интегрирования, используемый блоком, когда параметр Solver type блока powergui устанавливается на Discrete.
Discrete solver model автоматически установлен в Trapezoidal robust когда вы выбираете параметр Automatically handle Discrete solver and Advanced tab solver settings of blocks блока powergui.
Trapezoidal non iterative и Trapezoidal iterative (alg. loop) методы больше не рекомендуются для дискретизации блоков Asynchronous Machine. Trapezoidal non iterative требует, чтобы вы добавили ненезначительную загрузку шунта на терминалах машины, чтобы гарантировать устойчивость симуляции и Trapezoidal iterative (alg. loop) может не сходиться и заставляет симуляцию останавливаться, когда количество машин увеличивается в модели.
Trapezoidal robust и Backward Euler robust методы позволяют вам избавлять от необходимости использовать паразитные загрузки и симулировать машину без загрузок. Чтобы устранить топологические ошибки машин, соединенных с индуктивной схемой (например, выключатель, соединенный последовательно с машиной), машина моделирует незначительную внутреннюю загрузку 0,01% номинальной степени.
Trapezoidal robust метод немного более точен, чем Backward Euler robust метод, особенно когда модель симулирована в больших шагах расчета. Trapezoidal robust метод может произвести небольшие ослабленные числовые колебания на напряжении машины в условиях без загрузок, в то время как Backward Euler robust метод предотвращает колебания и обеспечивает хорошую точность.
Для получения дополнительной информации о том, какой метод необходимо использовать в приложении, смотрите Симуляцию Дискретизированные Электрические системы.
Параметр на этой вкладке используется инструментом Load Flow блока powergui. Они загружают параметр потока, используется для инициализации модели только. Это не оказывает влияния на модель блока или на эффективность симуляции.
Mechanical power (W) — Механическая энергия применилась к валу машиныМеханическая энергия применилась к валу машины в ваттах. Когда машина будет действовать в моторном режиме, задайте положительное значение. Когда машина будет действовать в режиме генератора, задайте отрицательную величину.
Для блока Asynchronous Machine SI Units значением по умолчанию является 1.492e+006. Для блока Asynchronous Machine pu Units значением по умолчанию является 0.
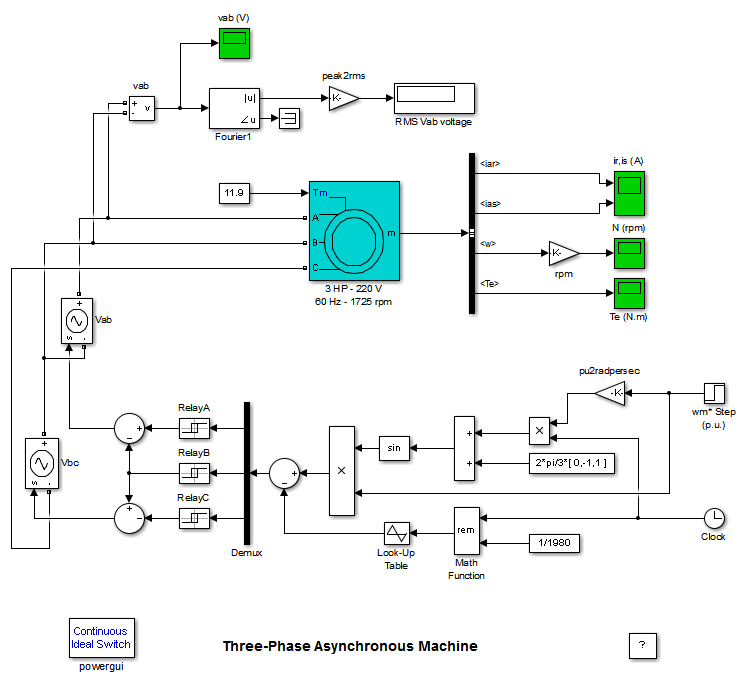
power_pwm пример использует блок Asynchronous Machine в моторном режиме. Пример состоит из асинхронной машины в системе регулировки скорости разомкнутого контура.
Ротор машины закорачивается, и статор питается инвертором PWM, созданным с блоками Simulink, и взаимодействовал через интерфейс с блоком Asynchronous Machine через блок Controlled Voltage Source. Инвертор использует синусоидальную модуляцию длительности импульса. Основная частота синусоидальной ссылочной волны установлена на уровне 60 Гц, и треугольная частота несущей установлена на уровне 1 980 Гц. Эта частота соответствует MF фактора частотной модуляции 33 (60 Гц x 33 = 1980).
Машина на 3 л. с. соединяется с постоянной загрузкой номинальной стоимости (11.9 N.m). Это запускается и достигает скорости сетбола 1.0 pu в t = 0,9 секунды.
Параметры машины совпадают с блоком Asynchronous Machine SI Units, за исключением индуктивности утечки статора, которая собирается в дважды нормальное значение симулировать индуктор сглаживания, помещенный между инвертором и машиной. Кроме того, стационарная система координат использовалась, чтобы получить показанные результаты.
Откройте power_pwm пример. В параметрах симуляции маленькая относительная погрешность требуется из-за высокого уровня переключения инвертора.
Запустите симуляцию и наблюдайте скорость и крутящий момент машины.
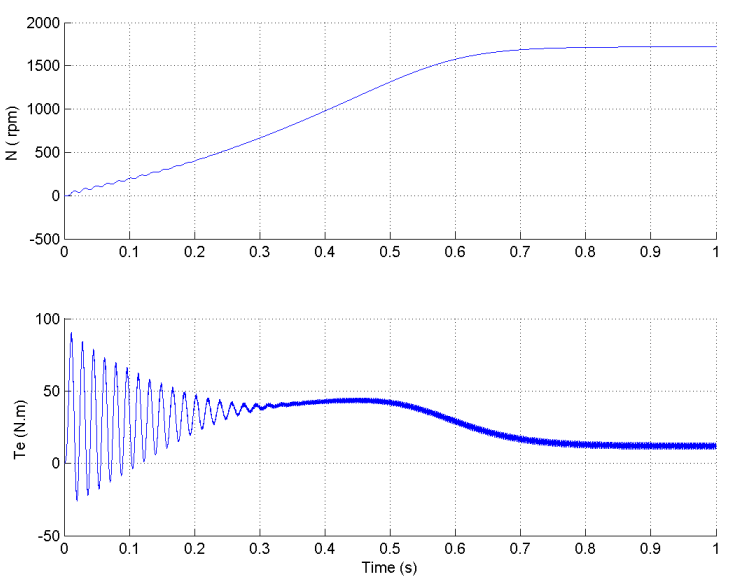
Первый график показывает скорость машины, идущую от 0 до 1 725 об/мин (1.0 pu). Второй график показывает электромагнитный крутящий момент, разработанный машиной. Поскольку статор питается инвертором PWM, шумный крутящий момент наблюдается.
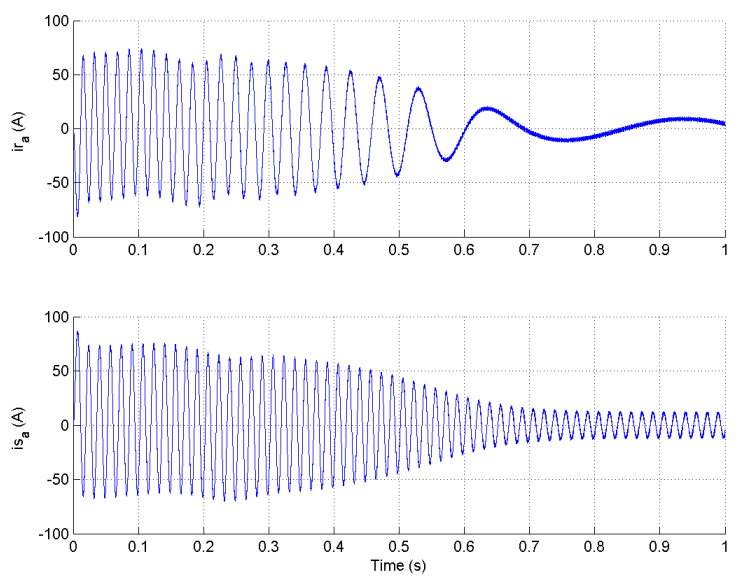
Однако этот шум не отображается в скорости, потому что это отфильтровано инерцией машины, но это видно в токах ротора и статоре.
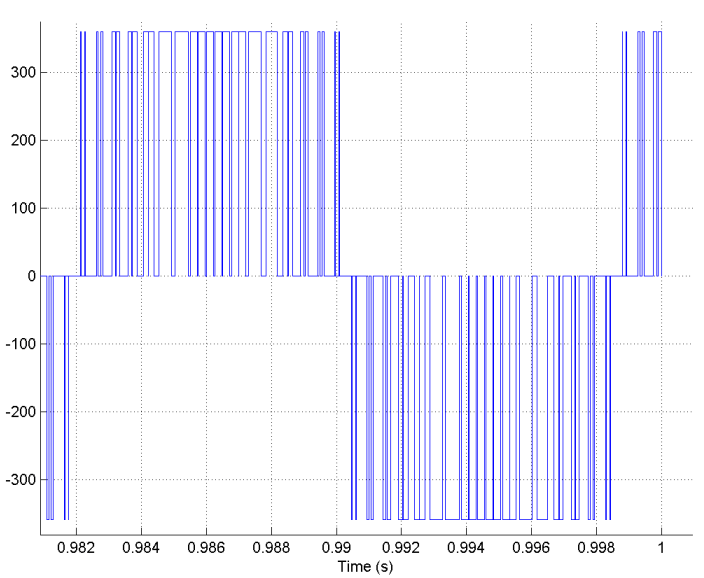
Посмотрите на выход инвертора PWM. Поскольку ничто из интереса не видно в шкале времени симуляции, концентратах графика на прошлых моментах симуляции.
power_asm_sat пример иллюстрирует эффект насыщения блока Asynchronous Machine.
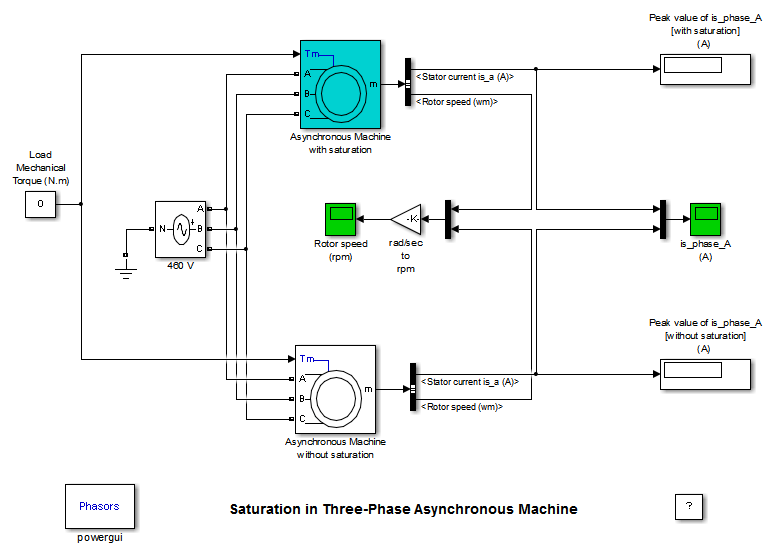
Два идентичных трехфазных двигателя (50 л. с., 460 В и 1 800 об/мин) симулированы, с и без насыщения, чтобы наблюдать эффекты насыщения относительно токов статора. Две различных симуляции поняты в примере.
Первая симуляция является установившимся тестом без загрузок. Эта таблица содержит значения параметров насыщения и измерений, полученных путем симуляции различных рабочих точек на влажном двигателе (без загрузок и в установившемся).
Параметры насыщения | Измерения | ||
|---|---|---|---|
Vsat (Vrms L-L) | Isat (достигают максимума A), | Vrms L-L | Is_A (достигают максимума A), |
- | - | 120 | 7.322 |
230 | 14.04 | 230 | 14.03 |
- | - | 250 | 16.86 |
- | - | 300 | 24.04 |
322 | 27.81 | 322 | 28.39 |
- | - | 351 | 35.22 |
- | - | 382 | 43.83 |
414 | 53.79 | 414 | 54.21 |
- | - | 426 | 58.58 |
- | - | 449 | 67.94 |
460 | 72.69 | 460 | 73.01 |
- | - | 472 | 79.12 |
- | - | 488 | 88.43 |
506 | 97.98 | 506 | 100.9 |
- | - | 519 | 111.6 |
- | - | 535 | 126.9 |
- | - | 546 | 139.1 |
552 | 148.68 | 552 | 146.3 |
- | - | 569 | 169.1 |
- | - | 581 | 187.4 |
598 | 215.74 | 598 | 216.5 |
- | - | 620 | 259.6 |
- | - | 633 | 287.8 |
644 | 302.98 | 644 | 313.2 |
- | - | 659 | 350 |
- | - | 672 | 383.7 |
- | - | 681 | 407.9 |
690 | 428.78 | 690 | 432.9 |
Следующий график иллюстрирует эти результаты и показывает точность модели насыщения. Измеренные рабочие точки соответствуют хорошо кривой, которая построена из данных о параметрах насыщения.
Можно наблюдать другие эффекты насыщения на токах статора путем выполнения симуляции с заторможенным ротором или со многими различными значениями крутящего момента нагрузки.
[1] Краузе, P.C., О. Уосинкзук, и С.Д. Садхофф, анализ электрического машинного оборудования, IEEE® Press, 2002.
[2] Mohan, N., T.M. НеДеленд, и В.П. Роббинс, силовая электроника: конвертеры, приложения, и проект, John Wiley & Sons, Inc., Нью-Йорк, 1995, разделяют 8.4.1.
