Синхронная машина, ориентированная на поле на управление
Simscape / Электрический / Управление / Управление SM
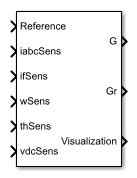
Блок SM Field-Oriented Control реализует синхронную машину (SM), ориентированную на поле на структуру управления. Поле ориентированное управление (FOC) является производительной стратегией управления электродвигателя переменного тока, которая разъединяет крутящий момент и поток путем преобразования стационарных токов фазы к вращающейся системе координат. Используйте FOC, когда скорость ротора и положение известны, и ваше приложение требует:
Высоко закрутите и низко текущий при запуске
Высокая эффективность
FOC SM составлен из нескольких блоков управления от библиотеки Control. Чтобы видеть и изменить эти блоки и внутреннюю структуру FOC, щелкните правой кнопкой по блоку по Simulink и выберите Mask> Look Under Mask. Полная структура управления составлена из нескольких частей:
Контроллер внешнего контура преобразует опорный сигнал, который вы предоставляете к ссылочному d - оси, q - ось и полевые токи.
Можно выбрать тип опорного сигнала, который вы обеспечиваете использованию Control mode параметр:
Velocity control — Управляйте или отрегулируйте скорость вращения синхронной машины. Внутренний блок Velocity Controller генерирует ссылочный крутящий момент от скоростной погрешности ротора.
Torque control — Управляйте или отрегулируйте механический крутящий момент SM.
Внутренний блок SM Current Reference Generator генерирует ссылочные токи с помощью контроллера пропорционального интеграла (PI), минимизируя ошибку крутящего момента.
Контроллер внутреннего цикла преобразует текущие ссылки в ссылки напряжения. Внутренний SM Current Controller генерирует ссылки напряжения с помощью ПИ-контроллера, минимизирующего текущую ошибку и условия прямого распространения:
где:
ωe является ротором электрическая скорость вращения.
Ld и Lq является d - и q - индуктивность статора оси.
Lmf является взаимной полевой индуктивностью якоря.
id, iq, и if, является статором d-q и полевые токи возбуждения, соответственно.
Генератор PWM преобразует ссылочные напряжения статора в импульсы логического элемента, которые будут переданы Конвертеру Степени, который приводит в действие обмотки статора синхронной машины.
Возбуждение Генератор PWM преобразует напряжение поля ссылки в импульсы логического элемента, которые будут переданы Прерывателю DC-DC, приводящему в действие обмотку возбуждения SM.
Эта схема показывает полную архитектуру блока.
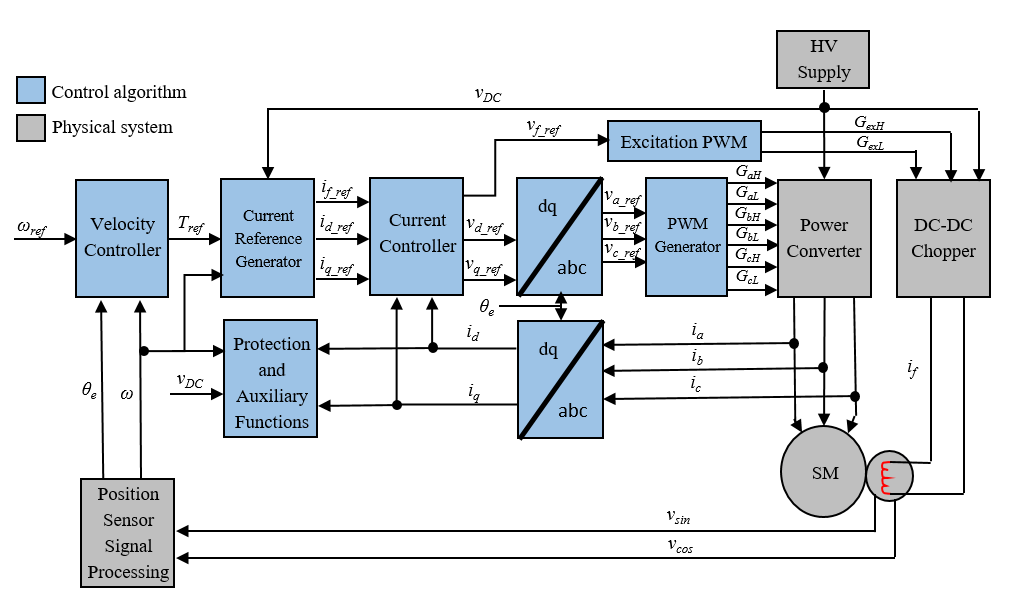
В схеме:
ω и ωref являются измеренными и ссылочными скоростями вращения, соответственно.
Tref является ссылочным электромагнитным крутящим моментом. Если вы конфигурируете блок для регулировки скорости, Скоростной Контроллер генерирует этот ссылочный крутящий момент.
i и v являются токами статора и напряжениями. Индексы d, q, и f, представляют d-ось, q-ось и обмотку возбуждения. Индексы a, b, и c, представляют три обмотки статора.
θe является ротором электрический угол.
G является импульсом логического элемента, индексы, которые H и L представляют высоко и низко, и индексы a, b и c, представляют три обмотки статора. Индекс ex представляет полевые импульсы возбуждения.
Можно принять решение реализовать или скорость или управление крутящим моментом с Control mode параметр. Блок реализует скоростное управление, точно так же, как показано в схеме. Блок реализует управление крутящим моментом путем удаления блока Velocity Controller и принятия ссылочного крутящего момента непосредственно.
Параметры машины известны.
Структура управления реализована с одной частотой дискретизации.
[1] Märgner, M. и В. Хакманн. "Управляйте проблемами внешне взволнованной синхронной машины в автомобильном приложении диска тяги". В Emobility-электроэнергии Обучаются. (2010): 1–6.
[2] Carpiuc, S., К. Лазарь и Д. Пэтрэску. "Оптимальное Управление Крутящим моментом Внешне Взволнованной Синхронной Машины". Журнал Разработки Управления и Прикладной Информатики. 14, № 2 (2012): 80–88.

