Синхронный регулятор машины со свисанием
Simscape / Электрический / Управление / Управление SM
Блок SM Governor with Droop реализует регулятор синхронной машины (SM) с характеристикой свисания. Используйте этот блок, чтобы отрегулировать или управлять входом дросселя движущей силе, управляющей синхронным генератором.
Блок использует ошибку между измеренными и желаемыми скоростями генератора, чтобы установить положение дросселя движущей силы. Например, когда движущая сила вращается слишком медленно, дроссель открыт, чтобы увеличить энергетический вход до генератора и увеличить его скорость.
Когда несколько управляемых регуляторами генераторов соединяются параллельно, характеристики свисания гарантируют полную устойчивость сетки. Свисание задано как процентное изменение в скорости ни от какой загрузки до предельной нагрузки генератора. Этот рисунок показывает отношение загрузки скорости для регулятора с 5%-м свисанием.
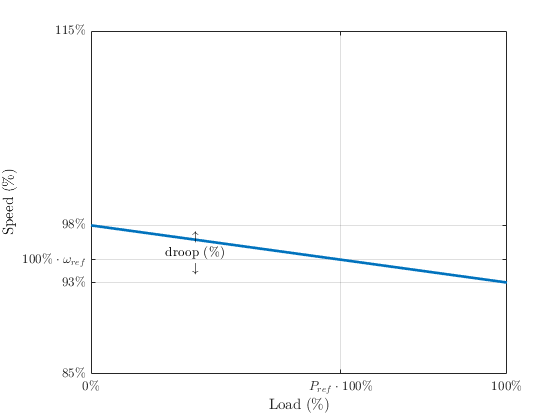
Здесь,
ωref является задающей скоростью регулятора. Установите это значение как использование на удельную величину порта speed_ref.
Pref является ссылочной загрузкой регулятора. Установите это значение как использование на удельную величину порта P_ref.
droop процент свисания регулятора. Установите это значение как процент с помощью параметра Percentage droop, (%).
Блок вычисляет ссылочную позицию дросселя, выраженную как на удельную величину, как:
где ω является фактической, скоростью генератора на модуль.
Инерция клапана вводит задержку между этим ссылочным положением дросселя и фактическим положением дросселя, которое моделируется как задержка первого порядка:
Здесь, Ts является постоянной времени. Установите это значение с помощью параметра Time constant of governor, (s).

