Радар обратного рассеяния сигнализирует от велосипедиста
backscatterBicyclist объект симулирует backscattered радарные сигналы, отраженные от движущегося велосипедиста. Велосипедист состоит и из велосипеда и из его наездника. Объектные модели движение велосипедиста и вычисляют сумму всех отраженных сигналов от нескольких дискретных рассеивателей на велосипедисте. Модель игнорирует внутренние поглощения газов в велосипедисте. Отраженные сигналы основаны на модели мультирассеивателя, разработанной из радиолокационной системы на 77 ГГц.
Рассеиватели расположены на пяти главных компонентах велосипедиста:
Велосипедная рама и наездник
Велосипедные педали
Бедра и голени наездника
Переднее колесо
Заднее колесо
Исключая колеса на велосипедисте существует 114 рассеивателей. Колеса содержат рассеиватели на оправе и спицах. Количество рассеивателей на колесах зависит от количества спиц на колесо. Количество спиц задано с помощью NumWheelSpokes свойство.
Можно получить текущее положение велосипедиста и скорость путем вызова move объектная функция. Вызывание этой функции также обновляет положение и скорость в следующий раз эпоха. Чтобы получить отраженный сигнал, вызовите reflect объектная функция. Можно построить мгновенное положение велосипедиста, использующего plot объектная функция.
bicyclist = backscatterBicyclist
bicyclist = backscatterBicyclist(Name,Value,...)
bicyclist = backscatterBicyclistbackscatterBicyclist объект, bicyclist, наличие значений свойств по умолчанию.
bicyclist = backscatterBicyclist(Name,Value,...)backscatterBicyclist объект, bicyclist, с каждым заданным свойством Name установите на заданный Value. Можно задать дополнительные аргументы пары "имя-значение" в любом порядке как (Name1, Value1..., NameN, ValueN). Любые незаданные свойства берут значения по умолчанию. Например,
bicyclist = backscatterBicyclist( ...
'NumWheelSpokes',18,'Speed',10.0, ...
'InitialPosition',[0;0;0],'InitialHeading',90, ...
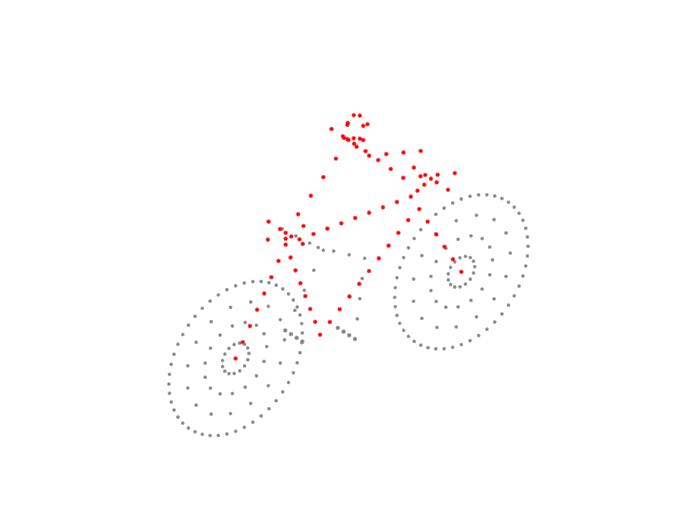
'GearTransmissionRatio',5.5);Этот рисунок иллюстрирует велосипедиста, начинающего повернуть налево.
Вычислите backscattered радарный сигнал от велосипедиста, проходящего ось X в на расстоянии в 5 м/с от радара. Примите, что радар расположен в начале координат. Радар передает сигнал LFM на уровне 24 ГГц с пропускной способностью на 300 МГц. Сигнал отражается в данный момент, велосипедист начинает перемещаться и затем одну секунду спустя.
Инициализируйте велосипедиста, форму волны и объекты канала распространения
Инициализируйте backscatterBicyclist, phased.LinearFMWaveform, и phased.FreeSpace объекты. Примите частоту дискретизации на 300 МГц. Исходное положение велосипедиста находится на оси X в 30 метрах от радара.
bw = 300e6; fs = bw; fc = 24e9; radarpos = [0;0;0]; bpos = [30;0;0]; bicyclist = backscatterBicyclist( ... 'OperatingFrequency',fc,'NumWheelSpokes',15, ... 'InitialPosition',bpos,'Speed',5.0, ... 'InitialHeading',0.0); lfmwav = phased.LinearFMWaveform( ... 'SampleRate',fs, ... 'SweepBandwidth',bw); sig = lfmwav(); chan = phased.FreeSpace( ... 'OperatingFrequency',fc, ... 'SampleRate',fs, ... 'TwoWayPropagation',true);
Постройте начальное положение велосипедиста
Используя move возразите функции, получите начальные положения рассеивателя, скорости и ориентацию велосипедиста. Постройте исходное положение велосипедиста. dt аргумент move объектная функция решает что следующий вызов move возвращает состояние велосипедиста движения dt несколько секунд спустя.
dt = 1.0; [bpos,bvel,bax] = move(bicyclist,dt,0); plot(bicyclist)

Получите сначала отраженный сигнал
Распространите сигнал ко всем рассеивателям и получите отраженное совокупное, возвращают сигнал.
N = getNumScatterers(bicyclist); sigtrns = chan(repmat(sig,1,N),radarpos,bpos,[0;0;0],bvel); [rngs,ang] = rangeangle(radarpos,bpos,bax); y0 = reflect(bicyclist,sigtrns,ang);
Постройте положение велосипедиста после обновления положения
После того, как велосипедист переместил, получает положения рассеивателя и скорости и затем перемещает велосипед вдоль его траектории в течение другой секунды.
[bpos,bvel,bax] = move(bicyclist,dt,0); plot(bicyclist)

Получите второй отраженный сигнал
Распространите сигнал ко всем рассеивателям в их новых положениях и получите отраженное совокупное, возвращают сигнал.
sigtrns = chan(repmat(sig,1,N),radarpos,bpos,[0;0;0],bvel); [~,ang] = rangeangle(radarpos,bpos,bax); y1 = reflect(bicyclist,sigtrns,ang);
Совпадайте с фильтром отраженные сигналы
Фильтр соответствия отраженные сигналы и строит их вместе.
mfsig = getMatchedFilter(lfmwav); nsamp = length(mfsig); mf = phased.MatchedFilter('Coefficients',mfsig); ymf = mf([y0 y1]); fdelay = (nsamp-1)/fs; t = (0:size(ymf,1)-1)/fs - fdelay; c = physconst('LightSpeed'); plot(c*t/2,mag2db(abs(ymf))) ylim([-200 -50]) xlabel('Range (m)') ylabel('Magnitude (dB)') ax = axis; axis([0,100,ax(3),ax(4)]) grid legend('First pulse','Second pulse')

Вычислите различие в области значений между максимумами этих двух импульсов.
[maxy,idx] = max(abs(ymf)); dpeaks = t(1,idx(2)) - t(1,idx(1)); drng = c*dpeaks/2
drng = 4.9965
Различие в области значений составляет 5 м, как ожидалось, учитывая скорость велосипедиста.
Отобразите спектрограмму, показывающую микроэффект Доплера на радарных сигналах, отраженных от рассеивателей на движущейся цели велосипедиста. Стационарный радар передает 1 000 импульсов радарной волны FMCW с пропускной способностью 250 МГц и 1 длительность. Радар действует на уровне 24 ГГц. Велосипедист запускает в 5 м от радара и переезжает на уровне 4 м/с.
Настройте форму волны, канал, передатчик, приемник и объекты платформной системы.
bw = 250e6; fs = 2*bw; fc = 24e9; c = physconst('Lightspeed'); tm = 1e-6; wav = phased.FMCWWaveform('SampleRate',fs,'SweepTime',tm, ... 'SweepBandwidth',bw); chan = phased.FreeSpace('PropagationSpeed',c,'OperatingFrequency',fc, ... 'TwoWayPropagation',true,'SampleRate',fs); radarplt = phased.Platform('InitialPosition',[0;0;0], ... 'OrientationAxesOutputPort',true); trx = phased.Transmitter('PeakPower',1,'Gain',25); rcvx = phased.ReceiverPreamp('Gain',25,'NoiseFigure',10);
Создайте bicyclist объект, перемещающийся в 4 метра/секунда.
bicyclistSpeed = 4; bicyclist = backscatterBicyclist('InitialPosition',[5;0;0],'Speed',bicyclistSpeed, ... 'PropagationSpeed',c,'OperatingFrequency',fc,'InitialHeading',0.0); lambda = c/fc; fmax = 2*bicyclist.GearTransmissionRatio*bicyclistSpeed/lambda; tsamp = 1/(2*fmax);
Цикл более чем 1 000 импульсов. Найдите угол падения радара. Распространите волну к каждому рассеивателю, и затем отразите волну от рассеивателей назад к радару.
npulse = 1000; xr = complex(zeros(round(fs*tm),npulse)); for m = 1:npulse [posr,velr,axr] = radarplt(tsamp); [post,velt,axt] = move(bicyclist,tsamp,0); [~,angrt] = rangeangle(posr,post,axt); x = trx(wav()); xt = chan(repmat(x,1,size(post,2)),posr,post,velr,velt); xr(:,m) = rcvx(reflect(bicyclist,xt,angrt)); end
Обработайте прибывающие сигналы. Во-первых, dechirp сигнал и затем передают сигнал в оконное Кайзером кратковременное преобразование Фурье.
xd = conj(dechirp(xr,x)); M = 128; beta = 6; w = kaiser(M,beta); R = floor(1.7*(M-1)/(beta+1)); noverlap = M - R; [S,F,T] = stft(sum(xd),1/tsamp,'Window',w,'FFTLength',M*2, ... 'OverlapLength',noverlap); maxval = max(10*log10(abs(S))); pcolor(T,-F*lambda/2,10*log10(abs(S))-maxval); shading flat; colorbar xlabel('Time (sec)') ylabel('Speed (m/s)')

Создайте пользовательский шаблон RCS, чтобы использовать с backscatterBicyclist объект.
Шаблон RCS вычисляется из косинусов, повышенных до четвертой степени. Постройте шаблон.
az = [-180:180]; el = [-90:90]; caz = cosd(az').^4; cel = cosd(el).^4; rcs = (caz*cel)'; imagesc(az,el,rcs) xlabel('Azimuth (deg)') ylabel('Elevation (deg)') colorbar

bicyclist = backscatterBicyclist( ... 'NumWheelSpokes',18,'Speed',10.0, ... 'InitialPosition',[0;0;0],'InitialHeading',90, ... 'GearTransmissionRatio',5.5,'AzimuthAngles',az, ... 'ElevationAngles',el,'RCSPattern',rcs);
Велосипедист состоит из пяти первичных компонентов: велосипедная рама и наездник, педали, участки наездника, переднее колесо и заднее колесо. Каждый компонент содержит много рассеивателей. Все компоненты перемещаются со скоростью, определенной заданной скоростью и направляющимися свойствами. Кроме того, участки, педали и колеса подвергаются циклическому движению, определенному скоростью.
Рассеиватели на системе координат и наезднике фиксируются относительно велосипедиста и перемещения со скоростью эго
где v является скоростью велосипедиста, заданного Speed свойство и H являются заголовком, заданным InitialHeading свойство. Эти свойства могут быть изменены путем вызова move функция.
Этот рисунок показывает местоположение рассеивателей на велосипедной раме и наезднике.
Рассеиватели на перемещении педалей с велосипедистом, но могут также вращать вокруг шпинделя заводной рукоятки с радиусом вращения Rплетеная корзинка. Существует два возможных движения педалей в зависимости от того, курсирует ли велосипед (свободный ход) или не каботажное судоходство:
Когда велосипед курсирует, педали не вращаются вокруг шпинделя заводной рукоятки, и скорость рассеивателей педали равняется скорости велосипедиста. Их положения относительно велосипедиста фиксируются. Каботажное судоходство включено путем установки Coast свойство к true или путем установки coast аргумент move возразите функции против true. Скорость педали
Когда велосипед не курсирует, наездник ездит на велосипеде. Скорость вращения педалей связана со скоростью вращения колес
где G является передаточным отношением, заданным GearTransmissionRatio свойство. Скорость рассеивателя педали равняется скорости вращения педали, умноженной на расстояние от педали, чтобы провернуть шпиндель. Векторная форма этого отношения:
Скорость педали относительно велосипедиста затем
Каботажное судоходство выключено путем установки Coast свойство к false или путем установки coast аргумент move возразите функции против false.
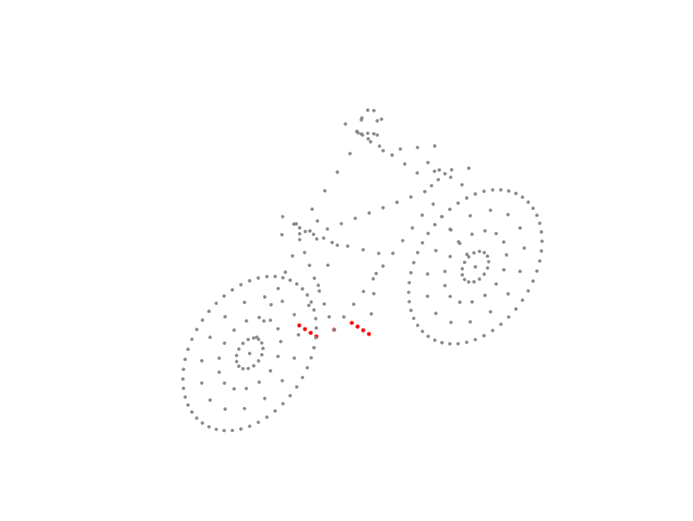
Этот рисунок показывает местоположения рассеивателей педали.
Рассеиватели на бедрах и голенях наездника перемещаются с велосипедом с добавленным циклическим движением. Существует два возможных движения участков в зависимости от того, курсирует ли велосипед или не курсирует:
Когда велосипед курсирует, участки не перемещаются с уважением к велосипеду и перемещению рассеивателей со скоростью велосипедиста. Каботажное судоходство включено путем установки Coast свойство к true или путем установки coast аргумент move возразите функции против true.
Когда велосипед не курсирует, бедра и голени выполняют перемещающееся движение. Бедра частично вращаются вокруг бедра наездника. Нога присоединена к педали и вращается с педалью. Колено соединяет голени и бедра. Местоположения ноги и бедер наездника определяют местоположения коленей и движение рассеивателей на участках.
Каботажное судоходство выключено путем установки Coast свойство к false или путем установки coast аргумент move возразите функции против false.
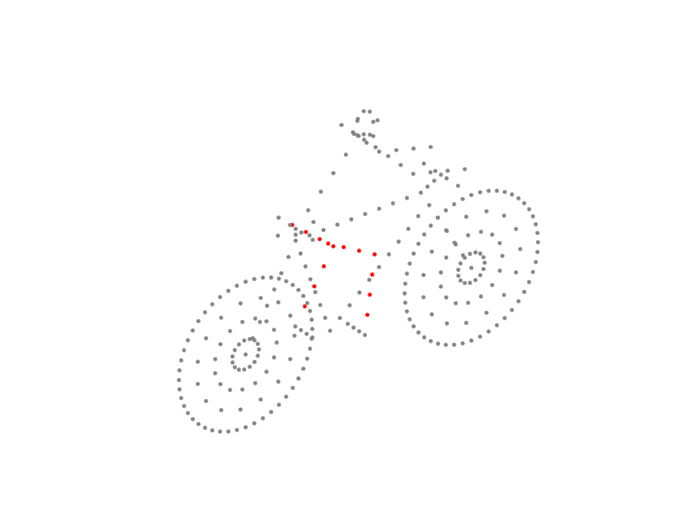
Этот рисунок показывает местоположения рассеивателей на бедрах и голенях наездника.
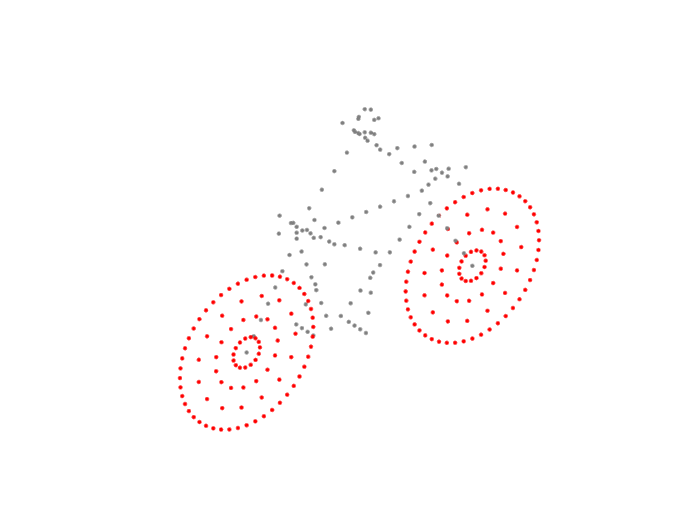
Рассеиватели находятся на спицах и оправах колес и вращаются вокруг оси колеса на различных расстояниях, rspk, от оси. Скорость рассеивателей в системе отсчета велосипедиста
Абсолютная скорость того, чтобы говорить или рассеивателя оправы
Этот рисунок показывает местоположения рассеивателей на оправах колеса и спицах.
[1] Штольц, M. и др. "Мультипредназначайтесь для Отражательной Модели Точки Велосипедистов для Автомобильного Радара". 2 017 европейских Радарных Конференций (EURAD), Нюрнберг, 2017, стр 94–97.
[2] Чен, V., Д. Тэхмоуш и В. Й. Мичели. Радар подписи Micro-Doppler: обработка и приложения. Учреждение разработки и технологии: Лондон, 2014.
[3] Belgiovane, D. и К. К. Чен. "Велосипеды и Человеческое Обратное рассеяние Наездника на уровне 77 ГГц для Автомобильного Радара". 2 016 10-х европейских Конференций по Антеннам и Распространению (EuCAP), Давосу, 2016, стр 1–5.
[4] Виктор Чен, микроэффект Доплера в радаре. Норвуд, MA: дом Artech, 2011.
backscatterPedestrian | getNumScatterers | move | phased.BackscatterRadarTarget | phased.BackscatterSonarTarget | phased.RadarTarget | phased.WidebandBackscatterRadarTarget | plot | reflect
