Найдите неопределенные переменные в модели Simulink
uvars = ufind('mdl') [uvars,pathinfo] = ufind('mdl') uvars = ufind(usys_1,usys_2,...)
uvars = ufind ('mdl') находит Неопределенные блоки Пространства состояний в модели mdl Simulink®. Это возвращает структуру uvars это содержит все неопределенные переменные, сопоставленные с Неопределенными блоками Пространства состояний. Каждой неопределенной переменной является ureal, umargin или ultidyn возразите и перечислен по наименованию в uvars.
[uvars,pathinfo] = ufind('mdl') возвращает массив ячеек pathinfoэто содержит пути к Неопределенным блокам Пространства состояний и соответствующим неопределенным переменным в блоке. Первый столбец pathinfo перечисляет пути к блоку через иерархию модели и вторые списки столбцов неопределенные переменные, сопоставленные с блоком. Используйте pathinfo проверять, что все Неопределенное Пространство состояний блокируется в модели mdl были идентифицированы.
uvars = ufind(usys_1,usys_2,...) собирает все неопределенные переменные, на которые ссылается неопределенная модель usys_n. usys_n может быть uss или ufrd модели. Используйте этот синтаксис в качестве альтернативы запросу самой модели, когда вы знаете неопределенные модели, что Неопределенное Пространство состояний блокирует использование.
ufind может найти Неопределенные блоки Пространства состояний в Подсистемах Маскированных, Ссылках Библиотеки и Моделях - ссылках, но не в Ускоренных Моделях - ссылках. ufind ошибки, если то же неопределенное имя переменной имеет различные определения в модели. Например, если ваша модель содержит два Неопределенных блока Пространства состояний, где неопределенные системные переменные задают ту же неопределенную переменную 'unc_par" как ultidyn('unc_par',[1 1]) и ureal('unc_par',5), такая ошибка происходит.
Найдите все Неопределенные блоки Пространства состояний и неопределенные переменные в модели Simulink:
Откройте модель Simulink.
open_system('usim_model')
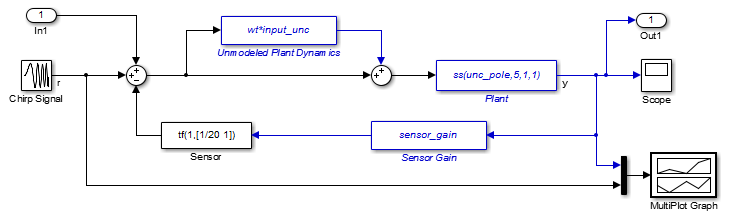
Модель, как показано в следующем рисунке, содержит три Неопределенных блока Пространства состояний под названием Несмоделированная Динамика Объекта, Объект и Усиление Датчика. Эти блоки зависят от трех неопределенных переменных под названием input_unc, unc_pole и sensor_gain.
Используйте ufind найти все Неопределенное Пространство состояний блокируется и неопределенные переменные в модели.
[uvars,pathinfo] = ufind('usim_model')
Введите uvars просмотреть структуру uvars. MATLAB® возвращает следующий результат:
uvars =
input_unc: [1x1 ultidyn]
sensor_gain: [1x1 ureal]
unc_pole: [1x1 ureal]
Каждой неопределенной переменной является ureal или ultidyn возразите и перечислен по наименованию в uvars.
Просмотрите пути к блоку Uncertain State Space и неопределенные переменные.
Введите pathinfo(:,1) просмотреть пути Неопределенного Пространства состояний блокируется в модели. MATLAB возвращает следующий результат:
ans =
'usim_model/Plant'
'usim_model/Sensor Gain'
'usim_model/Unmodeled Plant Dynamics'
Введите pathinfo(:,2) просмотреть неопределенные переменные, на которые ссылается каждый блок Uncertain State Space. MATLAB возвращает следующие результаты:
ans =
'unc_pole'
'sensor_gain'
'input_unc'
Симулируйте неопределенную модель в выбранных значениях параметров
Варьируйтесь неопределенные значения через несколько неопределенных блоков
Анализ робастности в Simulink
