Режим external mode позволяет моделям Simulink® на вашем хосте - компьютере связаться с развернутой моделью на вашем оборудовании робота во время времени выполнения. Используйте режим external mode, чтобы просмотреть сигналы или изменить параметры маски блока на вашей развернутой модели Simulink. Параметр, настраивающийся с режимом external mode, помогает вам внести изменения в свои алгоритмы, когда они работают на оборудовании в противоположность в симуляции в самом Simulink. В этом примере показано, как использовать режим external mode с Управлением с обратной связью поддерживающего ROS примера Робота, когда модель развертывается на оборудовании робота.
Сконфигурируйте модель Simulink, чтобы развернуться к оборудованию робота и включить режим external mode.
Откройте модель.
robotROSFeedbackControlExample
Установите параметры конфигурации модели.
В разделе Prepare под вкладкой ROS нажмите Hardware Settings, чтобы открыть диалоговое окно параметров конфигурации модели.
На панели Solver, набор Type к Fixed-step и Fixed-step size к 0.05.
В Target Hardware Resources, установленном параметры External mode. Чтобы приоритизировать скорость выполнения модели, включите Run external mode in a background thread. Нажмите OK.
Нажмите Deploy под вкладкой ROS. Затем под Deployment, нажмите Build & Run. По умолчанию Simulink всегда использует Build and run при использовании режима external mode.
В модели, набор Simulation mode к External.
В модели добавьте блоки осциллографа в сигналы, которые вы хотите просмотреть. В данном примере добавьте XY Graph (Simulink) осциллограф к X и Y сигналы, которые выходят из Bus Selector от подписчика ROS, который контролирует положение робота. Откройте блок XY Graph и измените минимальные и максимальные значения для каждой оси к [-10 10].
Теперь, когда модель сконфигурирована, можно развернуть и запустить модель на оборудовании робота.
Соединитесь с сетью ROS путем установки сетевого адреса. Сеть должна работать на вашем целевом оборудовании робототехники. Этот пример использует "Gazebo, Пустая" среда средства моделирования используется от Виртуальной машины с Гидро ROS и пример Gazebo. В Simulations вкладка выбирают ROS Network, чтобы сконфигурировать ваш адрес сети ROS. Задайте свой адрес устройства путем выбора Custom под Network Address и определением IP-адреса или имени хоста под Hostname/IP Address. Для этой виртуальной машины IP-адресом является 192.168.154.131.
Запустите модель. Модель развертывается на оборудовании робота и выполняется после процесса сборки, завершено. Этот шаг может занять время.
После того, как вы развертываете модель, и модель запускается, можно просмотреть ее сигналы и изменить ее параметры.
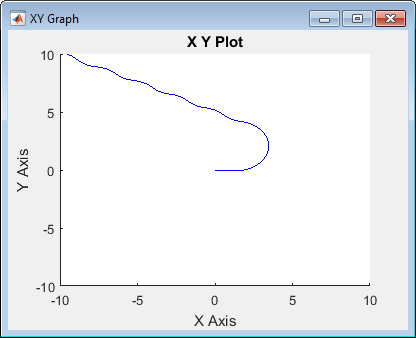
В то время как модель работает на оборудовании, просмотрите окно XY Graph (Simulink), чтобы контролировать положение робота в зависимости от времени.
Путь имеет небольшое колебание, которое происходит из-за высокой скорости робота, когда это отслеживает путь.
В то время как модель все еще запускается, вы можете также настройки параметров. Откройте Proportional Controller подсистема и изменение ползунок Linear Velocity к 0.25. Назад в основной модели, измените Desired Position постоянный блок в новое положение, [0 -5]. Робот управляет к новой позиции медленнее.
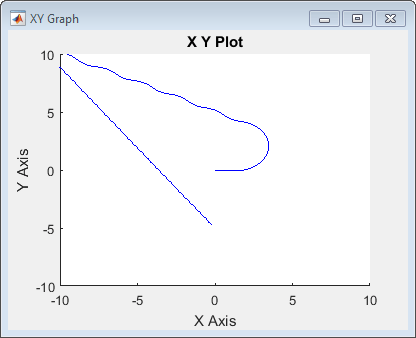
Пониженная скорость уменьшает колебание вдоль пути. Все эти модификации были сделаны, в то время как модель была развернута на оборудовании.
