Создайте входной порт для подсистемы или внешнего входа
Simulink / Обычно Используемые Блоки
Simulink / Ports & Subsystems
Simulink / Источники
HDL Coder / Обычно Используемые Блоки
HDL Coder / Ports & Subsystems
HDL Coder / Источники
Inport блокирует сигналы ссылки снаружи системы в систему.
Программное обеспечение Simulink® присваивает номера портов блока Inport согласно этим правилам:
Это автоматически нумерует блоки Inport в системе верхнего уровня или подсистеме последовательно, начиная с 1.
Если вы добавляете блок Inport, метка является следующим доступным номером.
Если вы удаляете блок Inport, другие номера портов автоматически перенумерованы, чтобы гарантировать, что блоки Inport находятся в последовательности и что никакие числа не не использованы.
Если вы копируете блок Inport в систему, ее номер порта не перенумерован, если ее текущий номер уже не конфликтует с импортом в системе. Если скопированный номер порта блока Inport не находится в последовательности, перенумеруйте блок. В противном случае вы получаете сообщение об ошибке, когда вы запускаете симуляцию или обновляете блок-схему.
Можно использовать блок Inport в системе верхнего уровня к:
Подайте внешние входные сигналы из рабочей области с помощью одного из этих подходов. Если никакие внешние выходные параметры не предоставляются, то выход по умолчанию является наземным значением.
Используйте Configuration Parameters> Data Import/Export> параметр Input. Смотрите Данные о Загрузке к Корневому Уровню Input port.
Совет
Чтобы импортировать много сигналов к входным портам корневого уровня, рассмотрите использование инструмента Root Inport Mapper. Для получения дополнительной информации смотрите, что Данные о Карте Используют Корневой Инструмент Картопостроителя Inport.
Используйте ut аргумент sim команда, чтобы задать входные параметры.
Обеспечьте средние значения для возмущения модели linmod и trim аналитические функции.
Используйте блоки Inport, чтобы ввести входные параметры в систему. См. Модели Линеаризации.
Чтобы загрузить регистрируемые данные сигнала с помощью корневых блоков Inport, используйте createInputDatasetDataset объект, который содержит элементы, соответствующие корневому уровню блоки Inport.
Блоки Inport в подсистеме представляют входные параметры подсистеме. Сигнал, прибывающий во входной порт на блоке Subsystem, вытекает из связанного блока Inport в той подсистеме. Блок Inport, сопоставленный с входным портом на блоке Subsystem, является блоком, параметр Port number которого совпадает с относительным положением входного порта на блоке Subsystem. Например, блок Inport, параметром Port number которого является 1 получает его сигнал от блока, соединенного с самым верхним портом на блоке Subsystem.
Если вы перенумеровываете Port number блока Inport, блок становится связанным с различным входным портом. Блок продолжает получать свой сигнал от того же блока вне подсистемы.
Блоки Inport в распространении метки сигнала поддержки подсистемы, но корневой уровень блоки Inport не делают.
Совет
Для моделей, которые включают шины, состоявшие из многих элементов шины, рассмотрите использование блоки Out Bus Element и In Bus Element. Эти блоки:
Уменьшайте сложность сигнальной линии и помеху в блок-схеме.
Облегчите изменять интерфейс инкрементно.
Предоставьте доступ к элементу шины ближе на грани использования, избежав использования настройки блока Bus Selector и Goto.
Блок In Bus Element имеет тип блока, Inport и блок Out Bus Element имеют тип блока Outport.
Можно создать любое количество копий блока Inport. Копии являются графическими представлениями оригинала, предназначенного, чтобы упростить блок-схемы путем устранения ненужных линий. Копия имеет тот же номер порта, свойства и выход как оригинал.
Создать копию блока Inport:
В блок-схеме выберите несвязанный блок Inport, который вы хотите скопировать.
Нажмите и удержите клавишу Ctrl и перетащите блок.
Выпустите мышь и затем выберите Duplicate из контекстного меню.
Можно выбрать блок Inport, который имеет копии, чтобы подсветить дублирующиеся блоки.
Если вы хотите, чтобы блок Inport корневого уровня модели произвел шину, установил параметр Data type на имя объекта шины, который задает шину, которую производит блок Inport. Для получения дополнительной информации смотрите Specify Bus Properties с Типами данных Object Simulink.Bus.
Port number — Положение порта на родительском блокеЗадайте порядок, в который порт, который соответствует блоку, появляется на родительском блоке Subsystem или Model.
Если вы добавляете блок, который создает другой порт, номер порта является следующим доступным номером.
Удаление всех блоков, сопоставленных с портом, удаляет порт. Другие порты перенумерованы так, чтобы они были последовательны и не пропускали чисел.
Определение номера порта, который превышает количество портов, создает порт для того номера и для любых пропущенных порядковых номеров.
Параметры блоков:
Port |
| Ввод: символьный вектор |
| Значения: действительное целое число |
Значение по умолчанию:
'1' |
Icon display — Отображение значкаPort number (значение по умолчанию) | Signal name | Port number and signal nameУкажите информацию, отображенную на значке блока.
Параметры блоков:
IconDisplay
|
| Ввод: символьный вектор |
Значения:
'Signal name' | 'Port number' | 'Port number and signal name' |
Значение по умолчанию:
'Port number'
|
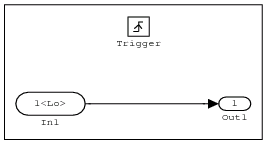
Latch input by delaying outside signal — Сигнал фиксатора задержкойoff (значение по умолчанию) | onВыберите, чтобы указать, что блок выводит значение входного сигнала на предыдущем временном шаге.
Установка этого флажка позволяет Simulink разрешить зависимости по данным среди триггируемых подсистем, которые являются частью цикла.
Блок Inport указывает, что эта опция выбрана путем отображения <Lo>.
Enabled в триггируемой подсистеме.
Параметры блоков:
LatchByDelaying OutsideSignal
|
| Ввод: символьный вектор |
Значения:
'on' | 'off' |
Значение по умолчанию:
'off'
|
Latch input for feedback signals of function-call subsystem outputs — Сигнал фиксатора от измененияoff (значение по умолчанию) | onВыберите, чтобы указать, что блок фиксирует значение входа к этой подсистеме и препятствует тому, чтобы это значение изменилось во время выполнения подсистемы. Для одного вызова функции, который переходится, чтобы вызвать несколько подсистем вызова функций, эта опция повреждает цикл, сформированный сигналом, возвращенным от одной из этих подсистем вызова функций в другой. Эта опция предотвращает любое изменение в значениях сигнала обратной связи от подсистемы вызова функций, которая вызывается во время выполнения этой подсистемы.
Блок Inport указывает, что эта опция выбрана путем отображения <Li>.
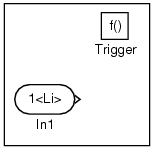
Enabled, когда блок Inport находится в подсистеме вызова функций.
Параметры блоков:
LatchInputFor FeedbackSignals
|
| Ввод: символьный вектор |
Значения:
'on' | 'off' |
Значение по умолчанию:
'off'
|
Interpolate data — Интерполируйте выходные данныеon (значение по умолчанию) | offПри загрузке данных от рабочей области до блока Inport корневого уровня задайте, интерполирует ли блок линейно и экстраполирует выход на временных шагах, для которых не существуют никакие соответствующие данные.
Загружать дискретные данные сигнала из рабочей области, в диалоговом окне блока Inport:
Установите параметр Sample time на дискретное значение, такой как 2.
Очистите параметр Interpolate data.
Определение дискретного шага расчета заставляет симуляцию поражать времена точно в тех экземплярах, когда дискретные данные производятся. Вы задаете значения данных, не временные стоимости.
Выключение интерполяции избегает неожиданных значений данных в других точках времени симуляции в результате обработки арифметики двойной точности. Для получения дополнительной информации смотрите Данные о Загрузке, чтобы Протестировать Дискретный Алгоритм.
Simulink использует следующую интерполяцию и экстраполяцию:
Для временных шагов между первой заданной точкой данных и последней заданной точкой данных — нулевой порядок содержат
Для временных шагов перед первой заданной точкой данных и после последней заданной точки данных — основывают значение
Для сигналов переменного размера для временных шагов перед первой заданной точкой данных — NaN регистрируется для одного или двойных типов данных и основания для других типов данных. Для временных шагов после последней заданной точки данных, наземных значений использования.
Параметры блоков:
Interpolate
|
| Ввод: символьный вектор |
Значения:
'on' | 'off' |
Значение по умолчанию:
'on'
|
Connect Input — Инструмент, чтобы помочь сопоставить сигналы с импортомЧтобы импортировать, визуализируйте, и сопоставьте сигнал и соедините шиной данные к импорту корневого уровня, нажмите эту кнопку. Отображения инструмента Root Inport Mapper.
Эта кнопка появляется, только если этот блок является корневым блоком импорта.
Нажмите кнопку Show data type assistant![]() , чтобы отобразить Data Type Assistant, который помогает вам установить атрибуты типа данных. Для получения дополнительной информации смотрите, Задают Типы данных Используя Ассистент Типа данных.
, чтобы отобразить Data Type Assistant, который помогает вам установить атрибуты типа данных. Для получения дополнительной информации смотрите, Задают Типы данных Используя Ассистент Типа данных.
Output function call — Выведите триггерный сигнал вызова функцииoff (значение по умолчанию) | onУкажите, что входной сигнал выводит триггерный сигнал вызова функции.
Выберите эту опцию, если необходимо для текущей модели принять триггерный сигнал вызова функции, когда ссылается в топ-модели.
Enabled в асинхронном вызове функции.
Minimum — Минимальное выходное значение[] (значение по умолчанию) | скалярНижнее значение выходной области значений это Simulink Check.
Этот номер должен быть конечным действительным двойным скалярным значением.
Примечание
Если вы задаете объект шины как тип данных для этого блока, не устанавливайте минимальное значение для данных о шине по блоку. Simulink игнорирует эту установку. Вместо этого установите минимальные значения для элементов шины объекта шины, заданного как тип данных. Для получения информации о свойстве Minimum элемента шины смотрите Simulink.BusElement.
Программное обеспечение Simulink использует это значение, чтобы выполнить:
Проверка диапазона симуляции (см., Указывает Диапазоны сигнала).
Автоматическое масштабирование типов данных с фиксированной точкой.
Оптимизация кода, который вы генерируете из модели. Эта оптимизация может удалить алгоритмический код и влиять на результаты некоторых режимов симуляции, такие как SIL или режим external mode. Для получения дополнительной информации смотрите, Оптимизируют использование заданных минимальных и максимальных значений (Embedded Coder).
Параметры блоков: OutMin |
| Ввод: символьный вектор |
Значения: '[ ]'| скаляр |
Значение по умолчанию: '[ ]' |
Maximum — Максимальное выходное значение[] (значение по умолчанию) | скалярВерхнее значение выходной области значений это Simulink Check.
Этот номер должен быть конечным действительным двойным скалярным значением.
Примечание
Если вы задаете объект шины как тип данных для этого блока, не устанавливайте максимальное значение для данных о шине по блоку. Simulink игнорирует эту установку. Вместо этого установите максимальные значения для элементов шины объекта шины, заданного как тип данных. Для получения информации о свойстве Maximum элемента шины смотрите Simulink.BusElement.
Программное обеспечение Simulink использует это значение, чтобы выполнить:
Проверка диапазона симуляции (см., Указывает Диапазоны сигнала).
Автоматическое масштабирование типов данных с фиксированной точкой.
Оптимизация кода, который вы генерируете из модели. Эта оптимизация может удалить алгоритмический код и влиять на результаты некоторых режимов симуляции, такие как SIL или режим external mode. Для получения дополнительной информации смотрите, Оптимизируют использование заданных минимальных и максимальных значений (Embedded Coder).
Параметры блоков: OutMax |
| Ввод: символьный вектор |
Значения: '[ ]'| скаляр |
Значение по умолчанию: '[ ]' |
Data type — Тип выходных данныхInherit: auto (значение по умолчанию) | double | single | half | int8 | uint8 | int16 | uint16 | int32 | uint32 | int64 | uint64 | fixdt(1,16) | fixdt(1,16,0) | fixdt(1,16,2^0,0) | string | Enum: <class name> | Bus: <object name> | <data type expression>Задайте тип выходных данных внешнего входа. Тип может быть наследован, задан непосредственно или описан как объект типа данных, такой как Simulink.NumericType.
Вы не можете ввести имя Simulink.Bus возразите как выражение типа данных. Задавать Data type для блока с помощью Bus возразите, выберите Bus: <object name> опция и замена <object name> с именем Bus объект.
Lock output data type setting against changes by the fixed-point tools — Препятствуйте тому, чтобы Fixed-Point Tool заменили типы данныхoff (значение по умолчанию) | onВыберите, чтобы заблокировать установку типа выходных данных этого блока против изменений Fixed-Point Tool и Советником Фиксированной точки. Для получения дополнительной информации смотрите, что Тип Выходных данных Блокировки Использования Устанавливает (Fixed-Point Designer).
Параметры блоков: LockScale |
| Ввод: символьный вектор |
Значения: 'off' | 'on' |
Значение по умолчанию: 'off' |
Output as nonvirtual bus — Задайте виртуальную или невиртуальную шину выходoff (значение по умолчанию) | onЗадайте, является ли выход для блока Inport верхнего уровня, используемого, чтобы загрузить данные о шине, виртуальным или невиртуальным.
Выберите этот параметр, чтобы задать невиртуальную шину выход.
Очистите этот параметр, чтобы задать виртуальную шину выход.
Все сигналы в невиртуальной шине должны иметь тот же шаг расчета, даже если связанный объект шины задает наследованный шаг расчета для некоторых элементов. Любая операция, которая привела бы к невиртуальной шине, содержащей сигналы с различными частотами дискретизации, генерирует ошибку. Вы не можете загрузить многоскоростные данные для невиртуальной шины. Смотрите Изменяют Шаги расчета для Невиртуальных Шин для получения дополнительной информации о том, как передать сигналы с различными частотами дискретизации в модель, на которую ссылаются, как невиртуальная шина.
Чтобы загрузить многоскоростные данные для шины, очистите параметр Output as nonvirtual bus и установите параметр Sample time на наследованный (-1).
Для топ-модели в иерархии модели - ссылки генерация кода создает структуру C, чтобы представлять невиртуальную шину выход.
Для моделей, на которые ссылаются выберите эту опцию, чтобы создать структуру C в сгенерированном коде. В противном случае генерация кода создает аргумент для каждого листового элемента шины.
Этот параметр только доступен для блоков Inport верхнего уровня с Bus: <object name> выбранный для параметра Data type.
Параметры блоков: BusOutputAsStruct |
| Ввод: символьный вектор |
Значения: 'off' | 'on' |
Значение по умолчанию: 'off' |
Unit (e.g., m, m/s^2, N*m) — Физическая единица измерения входного сигнала с блокомinherit (значение по умолчанию) | <Enter unit>Задайте физическую единицу измерения входного сигнала с блоком. Чтобы задать модуль, начните вводить в текстовом поле. При печати параметр отображает потенциальные модули соответствия. Для списка поддерживаемых модулей смотрите Позволенные Модульные Системы.
Чтобы ограничить модульную систему, щелкните по ссылке справа от параметра:
Если блок Unit System Configuration существует в компоненте, его диалоговое окно открывается. Используйте то диалоговое окно, чтобы задать позволенный и запрещенные модульные системы для компонента.
Если блок Unit System Configuration не существует в компоненте, отображениях диалогового окна модели Configuration Parameters. Используйте то диалоговое окно, чтобы задать позволенный и запрещенные модульные системы для модели.
Параметры блоков:
Unit
|
| Ввод: символьный вектор |
Значения:
'inherit' | '<Enter unit>'
|
Значение по умолчанию:
'inherit'
|
Port dimensions (-1 for inherited) — Размерности портаЗадайте размерности выходного сигнала для этого блока Inport.
-1 | Порт может загрузить данные для сигнала с любыми размерностями. Порт наследовал размерности от связанного сигнала. |
| Порт может загрузить данные для сигнала, который является вектором из размера |
| Порт может загрузить данные для матричного сигнала, имеющего |
Параметры блоков: PortDimensions |
| Ввод: символьный вектор |
Значения: '-1' | целое число | [целочисленное целое число] |
Значение по умолчанию: '-1' |
Variable-size signal — Позвольте сигналы переменного размераInherit (значение по умолчанию) | No | YesЗадайте тип сигналов, позволенных из этого порта. Чтобы позволить переменный размер и сигналы фиксированного размера, выберите Inherit. Чтобы позволить только сигналы переменного размера, выберите Yes. Чтобы позволить только сигналы фиксированного размера, выберите No.
Когда сигнал в этом порте является сигналом переменного размера, параметр Port dimensions задает максимальные размерности сигнала.
Параметр:
VarSizeSig
|
| Ввод: символьный вектор |
Значение:
'Inherit '| 'No' | 'Yes'
|
Значение по умолчанию:
'Inherit'
|
Sample time (-1 for inherited) — Задайте шаг расчетаЗадайте дискретный интервал между хитами шага расчета или задайте другой соответствующий шаг расчета такой как непрерывный или наследованный.
По умолчанию блок наследовал свой шаг расчета, основанный на контексте блока в модели. Чтобы установить различный шаг расчета, введите допустимый шаг расчета, основанный на таблице в Типах Шага расчета.
Параметры блоков:
SampleTime |
| Ввод: символьный вектор |
| Значения: скаляр |
Значение по умолчанию:
'-1' |
Signal type — Тип выходного сигналаauto (значение по умолчанию) | real | complexЗадайте числовой тип выхода сигнала. Чтобы выбрать числовой тип сигнала, который соединяется с его входом, выберите auto. В противном случае выберите действительный или комплексный тип сигнала.
Параметры блоков:
SignalType |
| Ввод: символьный вектор |
Значения:
'auto' | 'real' | 'complex' |
Значение по умолчанию:
'auto' |
Типы данных |
|
Прямое сквозное соединение |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
Обнаружение пересечения нулем |
|
In Bus Element | Outport | Asynchronous Task Specification (Simulink Coder)

