Концепции в этой теме обеспечивают сопоставимое и общеязыковое для использования программных инструментов Simulink®.
system является группой взаимозависимых физических и функциональных компонентов с измеримыми характеристиками то изменение в зависимости от времени.
Например, транспортное средство является системой с несколькими частями. Измеримые характеристики включают линейную скорость транспортного средства и скорость вращения колес.
system component является частью системы, которая взаимодействует с другими частями системы. Взаимодействия между компонентами задают структуру и поведение системы.
Например, модуль круиз-контроля является компонентом системы в системе транспортного средства. Микроконтроллер и оборудование, сопоставленное с ним, задают структуру, в то время как алгоритм программного обеспечения, чтобы контролировать скорость задает поведение.

model является математическим описанием системы, выведенной или из физических законов или из экспериментальных данных. Описание обычно использует набор переменных с набором дифференциальных и разностных уравнений, которые задают отношения между переменными.
В следующем примере для транспортного средства, u(t) сила (N) перемещение вперед транспортного средства, v(t) скорость (m/s), b коэффициент сопротивления (N ׂׂ · s/m), и m масса транспортного средства (kg).
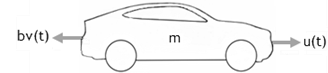
Транспортное средство является непрерывной системой. Для непрерывных систем дифференциальные уравнения описывают скорость изменения переменных уравнениями, определенными для всех значений времени. Скорость транспортного средства v(t)и его ускорение v'(t) заданы с выполняющим дифференциальным уравнением первого приказа.
![]()
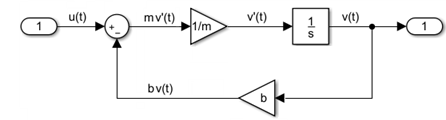
mv'(t) + bv(t) = u(t)
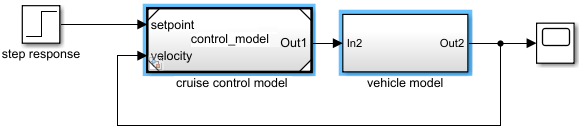
Можно создать модель Simulink для этого уравнения путем добавления блоков, определения поведения блока и использования сигнальных линий, чтобы соединить блоки друг с другом. Следующий Simulink block diagram реализует дифференциальное уравнение.
model component является частью модели, которая взаимодействует с другими частями через интерфейс вводов и выводов. Simulink реализует компоненты модели с помощью блоков Model и Subsystem. Блок Model ссылки другая модель Simulink, сохраненная в отдельном файле.
В следующем примере модель управления была сохранена в файле модели Simulink control_model.slx, и затем ссылаемый от блока Model во второй модели Simulink. Блок Subsystem был добавлен для моделирования механики транспортного средства.
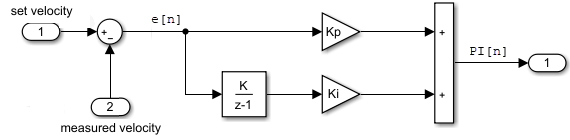
Как правило, контроллеры создаются с дискретными системами с помощью компьютера, чтобы реализовать алгоритм управления. Для дискретных систем разностные уравнения описывают скорость изменения переменных, заданных только в конкретные моменты времени. Например, управляющий сигнал для простого дискретного PI (пропорциональный интеграл) контроллер может быть задан со следующим разностным уравнением.
![]()
PI[n] = e[n]Kp + (e[n]+integral[n-1])Ki
Где e[n] ошибка между сигналом, значением которого управляют (скорость) и заданное значение (скорость набора), Kp постоянная пропорция, Ki постоянное интегрирование, и n временной шаг.
Следующая Диаграмма Simulink реализует разностное уравнение.
Смотрите также: Смоделируйте Непрерывную Систему, Компонентно-ориентированные Руководства по моделированию, Создайте Пользовательскую Библиотеку, Основы Модели - ссылки.
Некоторые системы уравнений содержат дополнительные ограничения, которые включают независимую переменную и вектор состояния в дополнение к дифференциальным уравнениям. Такие системы называются differential algebraic equations (DAEs),
Термин algebraic относится к уравнениям, которые не включают производных.
В моделях Simulink алгебраические циклы являются алгебраическими ограничениями. Модели с алгебраическими циклами задают систему дифференциальных алгебраических уравнений.
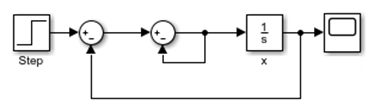
Например,
x' = x
0 =-x + u - 2x
система дифференциальных алгебраических уравнений, реализованных в следующей модели Simulink