Прогнозирующий контроллер драйвера, чтобы отследить продольную скорость и боковой путь
Vehicle Dynamics Blockset / Сценарии Транспортного средства / Драйвер
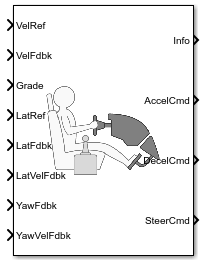
Блок Predictive Driver реализует контроллер, который генерирует нормированное регулирование, ускорение и торможение команд, чтобы отследить продольную скорость и боковое ссылочное смещение. Нормированные команды могут варьироваться между-1 к 1. Диспетчер использует однодорожечное (велосипед) модель для оптимального управления предварительным просмотром одно точки.
Используйте параметры External Actions, чтобы создать входные порты для сигналов, что можно использовать, чтобы симулировать стандартные тестовые маневры. Блок использует этот порядок приоритетов для входных команд: отключите (самый высокий), содержите, переопределение.
Эта таблица суммирует параметры внешнего действия.
| Цель | Параметр внешнего действия | Input port | Тип данных |
|---|---|---|---|
Замените команду акселератора с входной ускоряющей командой. | Accelerator override |
| Boolean |
| double | ||
Содержите ускоряющую команду в текущем значении. | Accelerator hold | AccelHld | Boolean |
Отключите ускоряющую команду. | Accelerator disable | AccelZero | Boolean |
Замените команду деселератора с входной командой замедления. | Decelerator override |
| Boolean |
| double | ||
Содержите команду деселератора в текущем значении. | Decelerator hold | DecelHld | Boolean |
Отключите команду деселератора. | Decelerator disable | DecelZero | Boolean |
Замените держащуюся команду с входной руководящей командой. | Steering override |
| Boolean |
| double | ||
Содержите держащуюся команду в текущем значении. | Steering hold | SteerHld | Boolean |
Отключите держащуюся команду. | Steering disable | SteerZero | Boolean |
Используйте параметр Longitudinal control type, cntrlType, чтобы задать одну из этих опций управления.
Установка | Блокируйте реализацию |
|---|---|
| Управление пропорциональным интегралом (PI) с отслеживанием завершения и усилений прямого распространения. |
| Управление PI с отслеживанием завершения и усилений прямого распространения, которые являются функцией скорости транспортного средства. |
| Оптимальный предварительный просмотр одно точки (предусматривает) модель управления, разработанную К. К. Макэдэм1, 2 года, 3. Модель представляет драйвер, регулирующий поведение управления во время следования траектории и маневров предотвращения препятствия. Предварительный просмотр драйверов (смотрит вперед), чтобы следовать за предопределенным путем. Реализовывать модель MacAdam, блок:
|
Используйте параметр Lateral control type, controlTypeLat, чтобы задать тип бокового управления. Таблица задает реализацию блока.
Установка | Блокируйте реализацию | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Оптимальный предварительный просмотр одно точки (предусматривает) модель управления, разработанную К. К. Макэдэм1, 2 года, 3. Модель представляет драйвер, регулирующий поведение управления во время следования траектории и маневров предотвращения препятствия. Предварительный просмотр драйверов (смотрит вперед), чтобы следовать за предопределенным путем. | ||||||||||||
| Контроллер, который использует метод Stanley4, чтобы минимизировать ошибку положения и угловую погрешность текущего положения относительно ссылочного положения. На панели Reference Control используйте:
|
Используйте параметр Shift type, ShftType, чтобы задать одну из этих опций сдвига.
Установка | Блокируйте реализацию |
|---|---|
| Никакая передача. Блок выводит постоянный механизм 1. Используйте эту установку, чтобы минимизировать количество параметров, необходимо сгенерировать ускорение и тормозящие команды, чтобы отследить прямое движение транспортного средства. Эта установка не позволяет противоположное движение транспортного средства. |
| Блок использует график Stateflow®, чтобы смоделировать противоположный, нейтральный, и планирование переключения передач диска. Используйте эту установку, чтобы сгенерировать ускорение и торможение команд, чтобы отследить вперед и инвертировать движение транспортного средства с помощью простого противоположный, нейтральный, и планирование переключения передач диска. В зависимости от состояния транспортного средства и скоростной обратной связи транспортного средства, блок использует начальный механизм и время, требуемое переключать, чтобы переключить транспортное средство в диск или вниз в противоположный или нейтральное. Для нейтральных механизмов, использование блока, тормозящее команды, чтобы контролировать скорость транспортного средства. Для реверсоров блок использует ускоряющую команду, чтобы сгенерировать крутящий момент и команду тормоза, чтобы уменьшить скорость транспортного средства. |
| Блок использует диаграмму Stateflow, чтобы смоделировать противоположный, нейтральный, парк и планирование переключения передач N-скорости. Используйте эту установку, чтобы сгенерировать ускорение и торможение команд, чтобы отследить вперед и инвертировать движение транспортного средства с помощью противоположного, нейтральный, парк и планирование переключения передач N-скорости. В зависимости от состояния транспортного средства и скоростной обратной связи транспортного средства, блок использует эти параметры, чтобы определить:
Для нейтральных механизмов, использование блока, тормозящее команды, чтобы контролировать скорость транспортного средства. Для реверсоров блок использует ускоряющую команду, чтобы сгенерировать крутящий момент и команду тормоза, чтобы уменьшить скорость транспортного средства. |
| Блок использует входной механизм, состояние транспортного средства и скоростную обратную связь, чтобы сгенерировать ускорение и тормозящие команды, чтобы отследить вперед и инвертировать движение транспортного средства. Для нейтральных механизмов, использование блока, тормозящее команды, чтобы контролировать скорость транспортного средства. Для реверсоров блок использует ускоряющую команду, чтобы сгенерировать крутящий момент и команду тормоза, чтобы уменьшить скорость транспортного средства. |
Используйте и Longitudinal velocity units, velUnits и параметр Angular units, angUnits, чтобы задать модули для портов ввода и вывода.
Используйте параметр Output gear signal, чтобы создать GearCmd выходной порт. GearCmd сигнал содержит целочисленное значение механизма транспортного средства, которым управляют.
Механизм | Целое число |
|---|---|
Парк | 80 |
Реверс | -1 |
Нейтральный | 0 |
Диск | 1 |
Механизм |
|
Используйте параметр Output handwheel angle, чтобы задать модули для держащихся портов.
Установка | Блокируйте реализацию | Порт | |
|---|---|---|---|
| Управляемый регулируют угол, нормированный от-1 до 1. Блок использует угловой предел насыщения колеса шины параметр Tire wheel angle limit, theta, чтобы нормировать команду. |
| |
Заменяет держащуюся команду с входной руководящей командой, нормированной от-1 до 1. |
| ||
| Управляемый регулируют угол, в модулях, заданных Angular units, angUnits. |
| |
Заменяет держащуюся команду с входной руководящей командой, в модулях, заданных Angular units, angUnits. |
| ||
Если вы устанавливаете тип управления на PI или Scheduled PI, блок реализует управление пропорциональным интегралом (PI) с отслеживанием усиления прямого распространения и завершение. Для Scheduled PI настройка, блок использует канал прямые усиления, которые являются функцией скорости транспортного средства.
Чтобы вычислить регулировку скорости выход, блок использует эти уравнения.
Установка | Уравнение |
|---|---|
|
|
|
|
Ошибка скорости фильтр lowpass использует эту передаточную функцию.
Чтобы вычислить ускорение и тормозящие команды, блок использует эти уравнения.
Уравнения используют эти переменные.
| vnom | Номинальная скорость транспортного средства |
| Kp | Пропорциональная составляющая |
| Ki | Интегральная составляющая |
| Kaw | Антизаключительное усиление |
| Kff | Скорость усиление прямого распространения |
| Kg | Угол класса усиление прямого распространения |
| θ | Градуируйте угол |
| τerr | Ошибочная постоянная времени фильтра |
| y | Номинальное управление вывело величину |
| ysat | Влажное управление вывело величину |
| eref | Ошибка скорости |
| eout | Различие между влажным и номинальным управлением выходные параметры |
| yacc | Ускоряющий сигнал |
| ydec | Торможение сигнала |
| v | Скоростной сигнал обратной связи |
| vref | Ссылочный скоростной сигнал |
Если вы устанавливаете Longitudinal control type, cntrlType или Lateral control type, cntrlType к Predictive, реализации блока оптимальный предварительный просмотр одно точки (предусматривают) модель управления, разработанную К. К. Макэдэм1, 2 года, 3. Модель представляет драйвер, регулирующий поведение управления во время следования траектории и маневров предотвращения препятствия. Предварительный просмотр драйверов (смотрит вперед), чтобы следовать за предопределенным путем. Реализовывать модель MacAdam, блок:
Представляет динамику как линейный одноколейный путь (велосипед) транспортное средство
Минимизирует предварительно просмотренный сигнал ошибки в одной точке секунды T* вперед вовремя
Счета на получение задержки драйвера из перцепционных и нейромускульных механизмов
Для ответвления и движения рыскания, блок реализует эти линейные динамические уравнения.
В матричном обозначении:
Модель одно точки принимает минимальный предварительно просмотренный сигнал ошибки в одной точке секунды T* вперед вовремя. a* является способностью к драйверу предсказать будущий ответ транспортного средства на основе текущего руководящего входа управления. b* является способностью к драйверу предсказать будущий ответ транспортного средства на основе текущего состояния транспортного средства. Блок использует эти уравнения.
Уравнения используют эти переменные.
| a, B | Передайте и назад утомите местоположение, соответственно |
| m | Масса транспортного средства |
| I | Транспортное средство вращательная инерция |
| CɑF | Передний коэффициент движения на повороте шины |
| CɑR | Коэффициент движения на повороте задней шины |
| a, B | Скаляр предсказания драйвера и векторное усиление, соответственно |
| x | Предсказанный вектор состояния транспортного средства |
| v | Поперечная скорость |
| r | Уровень рыскания |
| Ψ | Передний угол рыскания колеса |
| y | Боковое смещение |
| F | Системная матрица |
| δ, δF | Регулируйте угол, и передняя ось регулируют угол, соответственно |
| γ | Градуируйте угол |
| g | Управляйте вектором коэффициентов |
| U | Передайте (продольную) скорость транспортного средства |
| T* | Окно времени предварительного просмотра |
| ƒ(t+T*) | Предварительно просмотренный вход path T* секунды вперед |
| u | Тяговая сила |
| mT | Постоянный вектор наблюдателя; обеспечивает положение ответвления транспортного средства |
| ar | Статическая прокрутка и сопротивление автомобильной трансмиссии |
| br | Линейная прокрутка и сопротивление автомобильной трансмиссии |
| cr | Аэродинамическая прокрутка и сопротивление автомобильной трансмиссии |
| Fr | Сопротивление качению |
Модель одно точки, реализованная блоком, находит держащуюся команду, которая минимизирует локальный индекс эффективности, J, на текущем интервале предварительного просмотра, (t, t+T).
Чтобы минимизировать J относительно держащейся команды, это условие нужно соблюдать.
Можно описать решение для оптимального управления в терминах текущей неоптимальной и соответствующей ненулевой ошибки на выходе предварительного просмотра секунды T* ahead1, 2, 3.
Блок использует расстояние предварительного просмотра и транспортное средство продольная скорость, чтобы определить окно времени предварительного просмотра.
Уравнения используют эти переменные.
| T* | Окно времени предварительного просмотра |
| ƒ(t+T*) | Предварительно просмотренный вход path секунда T* вперед |
| y(t+T*) | Предварительно просмотренный объект секунда выхода T* вперед |
| e(t+T*) | Предварительно просмотренный сигнал ошибки секунда T* вперед |
| u(t), uo(t) | Регулируйте угол, и оптимальный регулируют угол, соответственно |
| L | Расстояние предварительного просмотра |
| J | Индекс эффективности |
| U | Передайте (продольную) скорость транспортного средства |
Модель одно точки, реализованная блоком, вводит задержку драйвера. Задержка драйвера составляет задержку, когда драйвер отслеживает задачи. А именно, это - транспортное получение задержки из перцепционных и нейромускульных механизмов. Чтобы вычислить транспортную задержку драйвера, блок реализует это уравнение.
Уравнения используют эти переменные.
| τ | Транспортная задержка драйвера |
| y(t+T*) | Предварительно просмотренный объект секунда выхода T* вперед |
| e(t+T*) | Предварительно просмотренный сигнал ошибки секунда T* вперед |
| u(t), uo(t) | Регулируйте угол, и оптимальный регулируют угол, соответственно |
| J | Индекс эффективности |
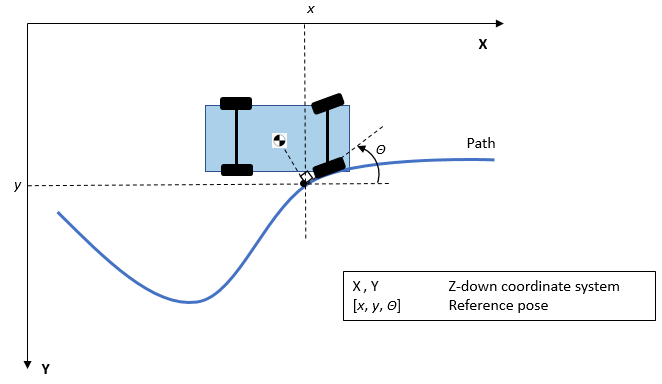
Если вы устанавливаете Lateral control type, controlTypeLat на Stanley, блок реализует Стэнли method4. Чтобы вычислить держащуюся угловую команду, контроллер Стэнли минимизирует ошибку положения и угловую погрешность текущего положения относительно ссылочного положения. Направление движения транспортного средства определяет эти ошибочные значения.
Чтобы вычислить держащуюся угловую команду, контроллер минимизирует ошибку положения и угловую погрешность текущего положения относительно ссылочного положения.
position error является боковым расстоянием от центра тяжести (CG) транспортного средства до контрольной точки на пути.
angle error является углом транспортного средства относительно ссылочного пути.
VelRef — Ссылочная скорость транспортного средстваscalarСсылочная скорость, vref, в модулях заданы Longitudinal velocity units, velUnits.
LongRef — Продольная ссылка смещенияscalarПродольный центр массы (CM) ссылка смещения, в инерционной системе координат, в m.
Включить этот порт:
Установите Lateral control type, controlTypeLat на Stanley
Очистите Vector input for reference and feedback
LatRef — Боковая ссылка смещенияscalarБоковой центр массы (CM) ссылка смещения, в инерционной системе координат, в m.
Чтобы включить этот порт, сделайте любой из них:
Установите Lateral control type, controlTypeLat на Stanley и очистите Vector input for reference and feedback.
Установите Lateral control type, controlTypeLat на Predictive.
EnblSteerOvr — Позвольте регулировать переопределение командыscalarПозвольте регулировать переопределение команды.
Чтобы включить этот порт, выберите Steering override.
Типы данных: Boolean
SteerOvrCmd — Регулирование команды переопределенияscalarРегулирование команды переопределения.
Используйте параметр Output handwheel angle, чтобы задать модули для держащихся портов.
Установка | Блокируйте реализацию | Порт | |
|---|---|---|---|
| Управляемый регулируют угол, нормированный от-1 до 1. Блок использует угловой предел насыщения колеса шины параметр Tire wheel angle limit, theta, чтобы нормировать команду. |
| |
Заменяет держащуюся команду с входной руководящей командой, нормированной от-1 до 1. |
| ||
| Управляемый регулируют угол, в модулях, заданных Angular units, angUnits. |
| |
Заменяет держащуюся команду с входной руководящей командой, в модулях, заданных Angular units, angUnits. |
| ||
Чтобы включить этот порт, выберите Steering override.
Типы данных: double
SteerHld — Регулирование содержитscalarБулев сигнал, который содержит держащуюся команду в текущем значении.
Чтобы включить этот порт, выберите Steering hold.
Типы данных: Boolean
SteerZero — Отключите держащуюся командуscalarОтключите держащуюся команду.
Чтобы включить этот порт, выберите Steering disable.
Типы данных: Boolean
EnblAccelOvr — Включите ускоряющее переопределение командыscalarВключите ускоряющее переопределение команды.
Чтобы включить этот порт, выберите Acceleration override.
Типы данных: Boolean
AccelOvrCmd — Ускоряющая команда переопределенияscalarУскоряющая команда переопределения, нормированная от 0 до 1.
Чтобы включить этот порт, выберите Acceleration override.
Типы данных: double
AccelHld — Ускорение содержитscalarБулев сигнал, который содержит ускоряющую команду в текущем значении.
Чтобы включить этот порт, выберите Acceleration hold.
Типы данных: Boolean
AccelZero — Отключите ускоряющую командуscalarОтключите ускоряющую команду.
Чтобы включить этот порт, выберите Acceleration disable.
Типы данных: Boolean
EnblDecelOvr — Включите переопределение команды замедленияscalarВключите переопределение команды замедления.
Чтобы включить этот порт, выберите Deceleration override.
Типы данных: Boolean
DecelOvrCmd — Команда переопределения замедленияscalarКоманда переопределения замедления, нормированная от 0 до 1.
Чтобы включить этот порт, выберите Deceleration override.
Типы данных: double
DecelHld — Замедление содержитscalarБулев сигнал, который содержит команду замедления в текущем значении.
Чтобы включить этот порт, выберите Deceleration hold.
Типы данных: Boolean
DecelZero — Отключите команду замедленияscalarОтключите команду замедления.
Чтобы включить этот порт, выберите Deceleration disable.
Типы данных: Boolean
ExtGear — Механизмscalar
Механизм | Целое число |
|---|---|
Парк | 80 |
Реверс | -1 |
Нейтральный | 0 |
Диск | 1 |
Механизм |
|
Чтобы включить этот порт, установите Shift type, shftType на External.
Grade — Дорожный угол классаscalarДорожный угол класса, γ, в градусе.
RefPose — Ссылочное положениеСсылочное положение в виде [x, y, Θ] вектор. x и y исчисляются в метрах, и Θ находится в модулях, заданных Angular units, angUnits.
x и y задают контрольную точку, чтобы вести транспортное средство к. Θ задает угол ориентации пути в этой контрольной точке и положителен в направлении против часовой стрелки.
Контрольная точка является точкой на пути, который является самым близким к CG транспортного средства. Можно использовать или Z-up или система координат транспортного средства Z-down, как долго вы используете ту же систему координат (Z-up или Z-down) для входных параметров блока и параметров.
Чтобы включить этот порт, установите Lateral control type, controlTypeLat на Stanley и выберите Vector input for reference and feedback pose.
Типы данных: single | double
VelFdbk — Продольная скорость транспортного средстваscalarПродольная скорость транспортного средства, U, в зафиксированной транспортным средством системе координат, в модулях заданы Longitudinal velocity units, velUnits.
CurrPose — Текущее положениеТекущее положение транспортного средства в виде [x, y, Θ] вектор. x и y исчисляются в метрах, и Θ находится в модулях, заданных Angular units, angUnits.
x и y задают местоположение транспортного средства, которое задано как CG транспортного средства. Можно использовать или Z-up или система координат транспортного средства Z-down, как долго вы используете ту же систему координат (Z-up или Z-down) для входных параметров блока и параметров.
Чтобы включить этот порт, установите Lateral control type, controlTypeLat на Stanley и выберите Vector input for reference and feedback pose.
Типы данных: single | double
LatFdbk — Боковое смещениеscalarБоковое смещение CM, yo, в инерционной системе координат, в m.
Чтобы включить этот порт, сделайте любой из них:
Установите Lateral control type, controlTypeLat на Stanley и очистите Vector input for reference and feedback.
Установите Lateral control type, controlTypeLat на Predictive.
LatVelFdbk — Боковая скорость транспортного средстваscalarБоковая скорость транспортного средства, vo, в зафиксированной транспортным средством системе координат, в m/s.
Включить этот порт, Набор Lateral control type, controlTypeLat к Predictive.
YawFdbk — Угол рыскания транспортного средстваscalarУгол рыскания транспортного средства, Ψo, в инерционной системе координат, в модулях заданы Angular units, angUnits.
Чтобы включить этот порт, сделайте любой из них:
Установите Lateral control type, controlTypeLat на Stanley и очистите Vector input for reference and feedback pose.
Установите Lateral control type, controlTypeLat на Predictive.
YawVelFdbk — Уровень рысканияscalarУровень рыскания, ro, в зафиксированной транспортным средством системе координат, в модулях заданы Angular units, angUnits в секунду.
Включить этот порт, Набор Lateral control type, controlTypeLat к Predictive.
[1] Щебеночное покрытие, C. C. "Оптимальное управление предварительным просмотром для линейных систем". Журнал динамических систем, измерения и управления. Издание 102, номер 3, сентябрь 1980.
[2] Щебеночное покрытие, C. C. "Приложение оптимального управления предварительным просмотром для симуляции автомобильного управления с обратной связью". Транзакции IEEE в системах, человеке и кибернетике. Издание 11, выпуск 6, июнь 1981.
[3] Щебеночное покрытие, C. C. Разработка Драйвера/Транспортного средства, Регулирующего Модели Взаимодействия для Динамического анализа. Итоговый Технический отчет UMTRI-88-53. Анн-Арбор, Мичиган: Научно-исследовательский институт Транспортировки Мичиганского университета, декабрь 1988.
[4] Хоффман, Габриэль М., Клэр Дж. Томлин, Майкл Монтемерло и Себастиан Трун. "Автономное Автомобильное Отслеживание Траектории для Управления Для бездорожья: Проектирование контроллера, Экспериментальная Валидация и Гонки". Американская Конференция по Управлению. 2007, стр 2296–2301. doi:10.1109/ACC.2007.4282788
