Чтобы выполнить основанную на ядре операцию, такую как фильтрация на пикселе в ребре системы координат, алгоритмы Vision HDL Toolbox™ заполняют ребра системы координат с дополнительными пикселями. Эти дополнительные пиксели используются для внутреннего вычисления только. Выходная система координат имеет те же размерности как входной кадр. Дополнительная операция присваивает шаблон пиксельных значений к неактивным пикселям вокруг системы координат. Алгоритмы Vision HDL Toolbox обеспечивают дополнение постоянным значением, репликацию или симметрию.
Некоторые блоки и Системные объекты также поддерживают выбор из установки дополнительных пиксельных значений. Эта опция уменьшает аппаратные ресурсы, используемые блоком и очищением, требуемым между системами координат, но влияет на точность выходных пикселей в ребрах системы координат.
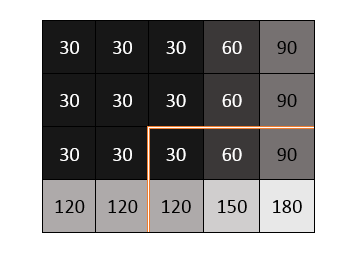
Схемы показывают верхний левый угол системы координат с дополнением добавленного, чтобы вместить ядро фильтра 5 на 5. При вычислении отфильтрованного значения для верхнего левого активного пикселя алгоритм требует двух строк и двух столбцов дополнения. Ребро активного изображения обозначается двойной линией.
| Тип дополнения | Описание | Схема |
|---|---|---|
Constant | Каждый добавленный пиксель присвоен то же значение. На некоторых блоках и Системных объектах можно задать постоянное значение. Значение | В схеме,
|
Replicate | Пиксельные значения в ребре активной системы координат повторяются, чтобы сделать строки и столбцы из дополнения пикселей. | Схема показывает шаблон реплицированных значений, присвоенных неактивным пикселям вокруг активной системы координат.
|
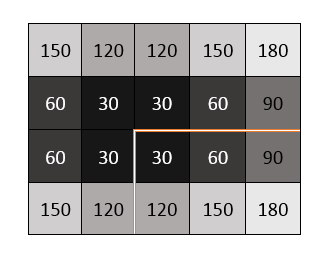
Symmetric | Дополнительные пиксели добавляются таким образом, что они зеркально отражают ребро изображения. | Схема показывает шаблон симметричных значений, присвоенных неактивным пикселям вокруг активной системы координат. Пиксельные значения симметричны о ребре изображения в обеих размерностях.
|
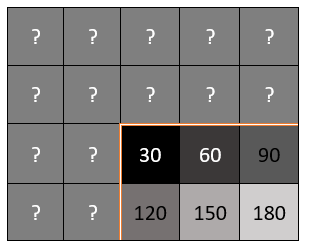
None | Эта опция исключает дополнительную логику. Буфер линии не устанавливает пиксели вне фрейма изображения ни к какому конкретному значению. Вычисление ядра использует текущее значение в буфере линии. Чтобы обеспечить пиксельную потоковую синхронизацию, выходная система координат одного размера с входным кадром. Однако избегать использования пикселей, вычисленных от неопределенных дополнительных значений, маски от KernelSize/2 пиксели вокруг ребра системы координат для нисходящих операций. Исключая дополнение может полезный для приложений, которые удовлетворяют любому из этих условий.
Для примера смотрите Пропускную способность Увеличения с Дополнением Ни одного. | Схема показывает неопределенные значения неактивных пикселей вокруг активной системы координат.
|
Дополнение требует минимальных горизонтальных и вертикальных времен гашения обратного хода. Этот интервал дает время алгоритма, чтобы добавить и сохранить дополнительные пиксели. Время гашения обратного хода или неактивная пиксельная область, должно быть, по крайней мере, пикселями KernelWidth горизонтально и линиями KernelHeight вертикально.
Когда вы устанавливаете Padding method на None, горизонтальное время гашения обратного хода должно иметь по крайней мере 6 пикселей переднего подъезда и 6 пикселей заднего крыльца. Для блока Median Filter с набором Padding method к None, горизонтальное очищение должно иметь по крайней мере 10 пикселей переднего подъезда и 10 пикселей заднего крыльца. Вертикальное очищение все еще должно быть линиями KernelHeight.
Image Filter | visionhdl.ImageFilter