Функция AUTOSAR Blockset позволяет настроить калибровку адаптивных данных приложений во время выполнения на основе подчиненной связи XCP и генерации файлов ASAP2 (A2L). Возможности XCP и ASAP2 определены вне спецификации адаптивной платформы (AP), которая начиная с версии 19-11 не предназначена для калибровки данных.
В рамках создания и развертывания адаптивного кода можно настроить интерфейсы для связи подчиненных компонентов XCP в сгенерированном коде C++ и экспортировать файлы A2L, содержащие данные модели для измерения и калибровки.
Перед развертыванием адаптивного кода:
В диалоговом окне «Параметры конфигурации» сконфигурируйте модель для генерации вызовов подчиненных функций XCP в адаптивном коде C++ и создания раздела XCP в файле ASAP2 (A2L).
В галерее Общий доступ (Share) на вкладке AUTOSAR модели используйте команду Создать файлы калибровки (Generate Calibration Files) для создания файлов ASAP2 (A2L), содержащих данные модели для измерения и калибровки.
Для активизации возможности связи используйте параметр конфигурации адаптивной модели AUTOSAR Transport layer (Embedded Coder) для выбора транспортного уровня XCP. Если для транспортного слоя задано значение, отличное от None, Simulink ® добавляет вызовы подчиненных функций XCP к сгенерированному коду C++. По умолчанию инструмент использует стек подчиненных компонентов MathWorks ® XCP.
Выбор транспортного уровня XCP активизирует другие параметры XCP. На этом рисунке показаны параметры конфигурации подчиненной модели XCP.
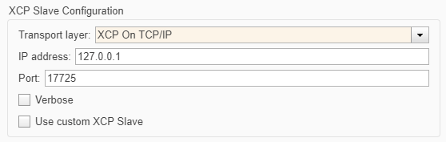
Используя параметры конфигурации модели, можно:
Укажите транспортный уровень, который требуется использовать для связи.
Укажите IP-адрес целевого компьютера и номер порта. Порт можно использовать только для одного приложения.
При необходимости включите подробные сообщения для ведомого сервера XCP.
Кроме того, вместо подчиненного устройства XCP MathWorks можно использовать пользовательскую реализацию подчиненного устройства XCP на основе транспортного уровня Ethernet. Для использования пользовательского подчиненного устройства XCP, обеспечьте реализацию функций, объявленных в файле заголовка подчиненного устройства XCP, с помощью пользовательских команд API подчиненного устройства XCP. Файл заголовка подчиненного устройства XCP находится в папке установки MATLAB ®matlabroot/toolbox/coder/autosar/adaptive
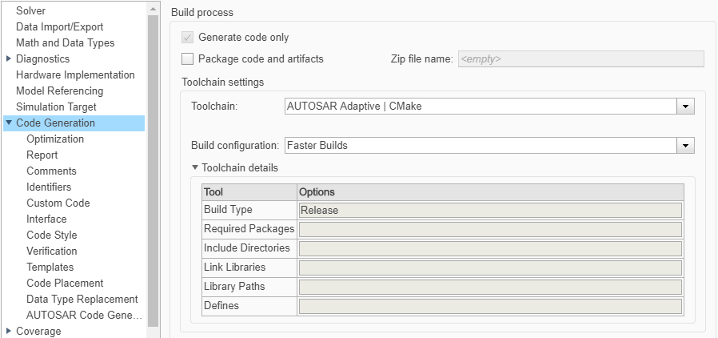
Добавьте пользовательские сведения о подчиненном устройстве XCP в параметре конфигурации Toolchain details или добавьте сведения вручную в CMakeLists.txt файл.
Чтобы создать файлы ASAP2 (A2L), используйте команду Создать файлы калибровки (Generate Calibration Files) из галереи Общий доступ (Share) на вкладке AUTOSAR модели. Дополнительные сведения см. в разделе Создание файлов калибровки ASAP2 и CDF (Simulink Coder).
Транспортный уровень (встроенный кодер) | coder.asap2.export (Кодер симулятора)
