Скомпенсировать фильтр CIC с помощью дециматора FIR
Проекты фильтрации/фильтрации
dspfdesign
Блок CIC Compensation Decimator использует многофазный дециматор FIR в качестве компенсационного фильтра. Прореживатели компенсации CIC представляют собой многоскоростные фильтры FIR, которые могут быть каскадированы с прореживателями CIC для уменьшения недостатков фильтров CIC.
Фильтры прореживания CIC используются в областях, требующих высокого прореживания. Эти фильтры популярны в ASIC и FPGA, так как не имеют никаких множителей. Фильтры ЦВК имеют два недостатка:
CIC-фильтры имеют амплитудную характеристику, которая вызывает провал в области полосы пропускания. Этот отклик величины:
start2 )) n
M - Дифференциальная задержка
n - Количество ступеней
λ - Нормированная угловая частота
Фильтры CIC имеют широкую переходную область.
Компенсационные прореживающие фильтры имеют обратную характеристику полосы пропускания для коррекции спада CIC и имеют узкую ширину перехода.
Этот блок предоставляет возможности dsp.CICCompensationDecimator object™ системы в среду Simulink ®.
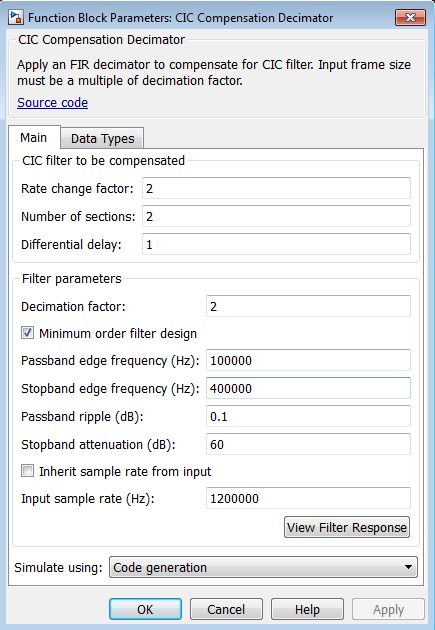
Коэффициент изменения скорости для компенсируемого фильтра CIC, заданный как положительное скалярное целое число. Значение по умолчанию: 2.
Число прореживающих и гребенчатых секций компенсируемого фильтра CIC, определяемое как положительное скалярное целое число. Значение по умолчанию: 2.
Значение задержки, используемое в каждой из гребенчатых секций компенсируемого фильтра CIC, задается как положительное скалярное целое число. Значение по умолчанию: 1.
Коэффициент прореживания компенсатора, определяемый как положительное скалярное целое число. Число входных строк должно быть кратным коэффициенту прореживания. Значение по умолчанию: 2.
При установке этого флажка блок проектирует фильтры с минимальным порядком, соответствующим спецификациям частоты полосы пропускания, частоты полосы останова, пульсации полосы пропускания и затухания полосы останова. При снятии этого флажка блок проектирует фильтры с порядком, указанным в поле «Порядок фильтров».
По умолчанию этот флажок установлен.
Порядок компенсационного фильтра, заданного как положительное скалярное целое число. Значение по умолчанию: 12.
Частота границ полосы пропускания компенсационного фильтра, заданная как действительный положительный скаляр в Гц. Частота границ полосы пропускания (Гц) должна быть меньше Fs/2, где Fs - частота входных выборок. Значение по умолчанию: 100000.
Частота края полосы останова компенсационного фильтра, заданная как действительный положительный скаляр в Гц. Частота краев стоп-полосы (Гц) должна быть меньше Fs/2, где Fs - частота входных выборок. Этот параметр применяется при установке флажка Конструкция фильтра минимального порядка (Minimum order filter design). Значение по умолчанию: 400000.
Пульсация полосы пропускания компенсационного фильтра, заданная как действительный положительный скаляр в дБ. Значение по умолчанию: 0.1.
Затухание полосы останова компенсационного фильтра, заданного как действительный положительный скаляр в дБ. Значение по умолчанию: 60.
Если этот флажок установлен, блок наследует частоту дискретизации от входного сигнала. Если этот флажок снят, необходимо указать частоту дискретизации в поле Частота дискретизации на входе (Гц).
Частота входных выборок, заданная как скаляр в Гц. Значение по умолчанию: 1200000.
Открывает окно Инструмент визуализации фильтра (Filter Visualization Tool) FVTool (FVTool) и отображает отклик величины/фазы дециматора компенсации CIC. Ответ основан на параметрах диалогового окна блока. Изменения, внесенные в эти параметры, обновляют FVTool.
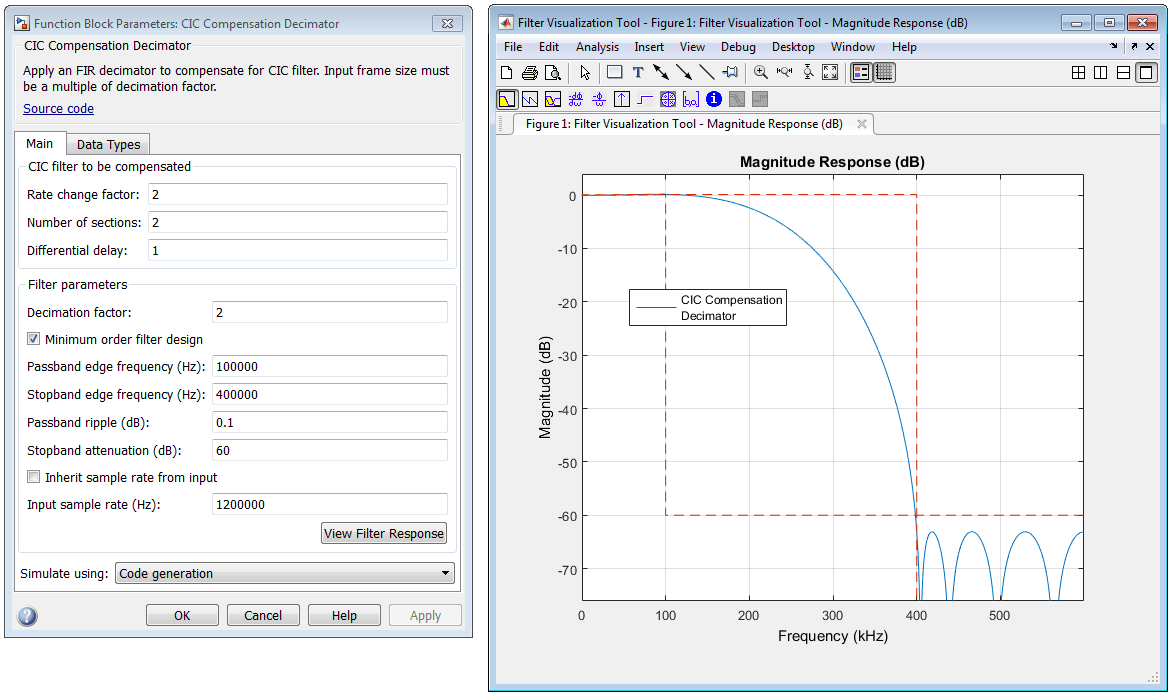
Чтобы обновить отклик величины во время выполнения команды FVTool, измените параметры диалогового окна и нажмите кнопку «Применить».
Тип выполняемого моделирования. Для этого параметра можно установить значение:
Code generation (по умолчанию)
Моделирование модели с использованием сгенерированного кода C. При первом запуске моделирования Simulink генерирует код C для блока. Код C используется повторно для последующего моделирования, если модель не изменяется. Этот параметр требует дополнительного времени запуска, но обеспечивает более высокую скорость моделирования, чем Interpreted execution.
Interpreted execution
Моделирование модели с помощью интерпретатора MATLAB ®. Эта опция сокращает время запуска, но имеет более низкую скорость моделирования, чем Code generation.

Метод округления для выходных операций с фиксированной точкой. Методы округления: Ceiling, Convergent, Floor, Nearest, Round, Simplest, и Zero. Значение по умолчанию: Floor.
Тип данных коэффициентов с фиксированной точкой, указанный как один из следующих:
fixdt(1,16) (по умолчанию) - подписанный тип данных длины слова с фиксированной точкой 16, с двоичным масштабированием точек. Блок автоматически определяет длину дроби из значений коэффициентов таким образом, чтобы коэффициенты занимали максимальный представимый диапазон без переполнения.
fixdt(1,16,0) - Подписанный тип данных с фиксированной точкой длины слова 16, длина фракции 0. Можно изменить длину дроби на любое другое целое значение.
<data type expression> - Укажите тип данных коэффициентов с помощью выражения, которое вычисляет объект типа данных, например числовой тип (fixdt ([ ],16, 15)), чтобы указать тип данных коэффициентов. Укажите режим знака этого типа данных как [ ] или true.
Refresh Data Type - Обновить до типа данных по умолчанию.
Нажмите кнопку Show data type assistant (Показать ассистент по типу данных![]() ), чтобы отобразить ассистент по типу данных, который помогает задать входной параметр рабочей области.
), чтобы отобразить ассистент по типу данных, который помогает задать входной параметр рабочей области.
Дополнительные сведения см. в разделе Определение типов данных с помощью помощника по типам данных (Simulink).
| Порт | Поддерживаемые типы данных |
|---|---|
Вход |
|
Продукция |
|
Ответ фильтра CIC определяется следующим образом:
(start2)] N
R, D и N - коэффициент изменения скорости, дифференциальная задержка и количество секций фильтра CIC, соответственно.
После прореживания ответ cic имеет вид:
ω2R)] N
Нормализованная версия этого последнего ответа является той, которую должен компенсировать компенсатор CIC. Следовательно, отклик полосы пропускания компенсатора CIC должен принимать следующий вид:
ω≤ωp<π
где startp - частота полосы пропускания компенсационного фильтра CIC.
Обратите внимание, что при ω/2R ≪ δ предыдущее уравнение для Hciccomp (λ) можно упростить, используя тот факт, что sin (x) ≅ x:
Nfor ω≤ωp<π
Это предыдущее уравнение представляет собой обратное синк-приближение к истинному обратному отклику полосы пропускания фильтра CIC.
