Клапан гидравлический противовесный
Simscape/Жидкости/Гидравлические (изотермические )/Клапаны/Клапаны регулирования расхода

Противовесные клапаны применяются в гидросистемах, работающих с перегрузкой (выбегом) или подвешенной нагрузкой. Они предназначены для создания противодавления на возвратной линии привода, чтобы предотвратить потерю контроля над нагрузкой. На следующей иллюстрации показана схема противовесного клапана.
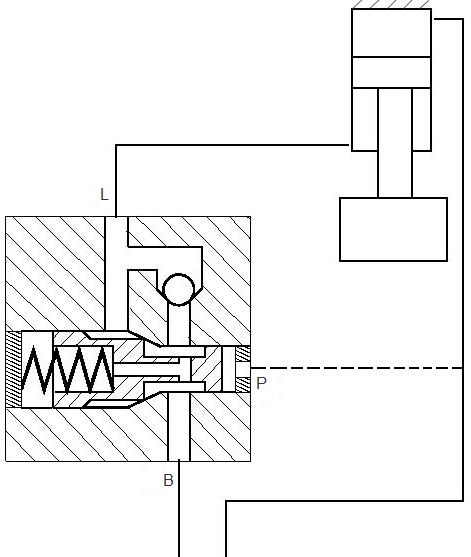
Если направленный клапан (не показан на рисунке) смещен в положение, которое понижает нагрузку, то текучая среда из штоковой камеры цилиндра может выходить только в том случае, если давление в отверстии Р (давление пилот-сигнала) и отверстии L (давление нагрузки) создают достаточное усилие для преодоления усилия пружины и открытия клапана. В статике клапан описывается уравнением
| (1) |
где
| F0 | Настройка пружины |
| c | Скорость пружины |
| x | Открытие клапана |
| пилот | Давление пилота (давление в порту P) |
| pload | Давление нагрузки (давление в порту L) |
| pback | Противодавление (давление в обратном канале B) |
| Apilot | Эффективная зона клапана на пилотном порту P |
| Aload | Эффективная зона клапана в порту нагрузки L |
| Назад | Эффективная зона клапана в обратном канале B |
Противовесный клапан, классифицируемый по типу, представляет собой управляемый изнутри снаружи клапан, поскольку и управляющее давление, и давление нагрузки имеют тенденцию открывать клапан. После незначительных перестановок уравнение 1 принимает вид
| (2) |
Aback/Aload
где
| pset | Настройка давления клапана |
| CP | Жесткость пружины (Па/м) |
| x | Открытие клапана |
| kpilot | Коэффициент пилот-сигнала |
| kback | Коэффициент противодавления |
Смещение клапана определяется из уравнения 2:
| (3) |
где xmax - максимальное смещение клапана.
Блок противовесного клапана может быть представлен в виде следующей структурной модели.
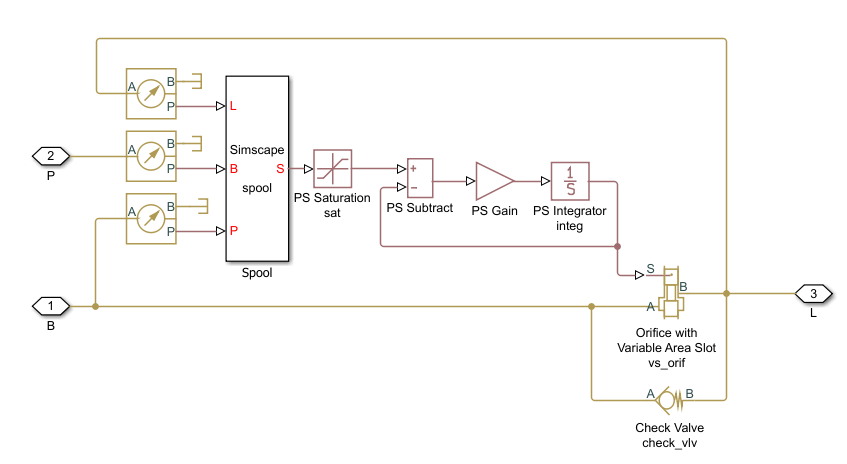
Датчики давления измеряют давление в соответствующих портах и передают их значения блоку Fcn, который вместе с блоком насыщения PS выполняет вычисления в соответствии с уравнением 3. Смещение клапана проходит через блок запаздывания первого порядка, построенный из блоков PS Subtract, PS Gain и PS Integrator, для учета динамики клапана. Коэффициент усиления PS блока усиления устанавливается равным 1/T, где T - постоянная времени. Блоки регулируемой диафрагмы и обратного клапана имитируют диафрагму противовесного клапана и обратный клапан. В фактической модели блока противовесного клапана операции, выполняемые датчиками и блоком Fcn, выполняются в разделе уравнения блока.
Блок противовесного клапана по существу является моделью на основе технических данных. В зависимости от данных, перечисленных в каталогах производителя или листах технических данных для конкретного клапана, можно выбрать одну из следующих опций параметризации модели:
By maximum area and opening - Используйте эту опцию, если в спецификации указана только максимальная площадь диафрагмы и максимальный ход элемента управления.
By area vs. opening table - Используйте эту опцию, если каталог или лист технических данных содержит таблицу площади прохода диафрагмы на основе смещения элемента управления.
В последнем случае блок PS Saturation в структурной модели заменяется блоком PS Lookup Table (1D), и можно выбрать из трех методов интерполяции и двух методов экстраполяции.
Соединения L и B являются каналами гидравлической экономии, связанными с портами нагрузки и противодавления клапана. Порт P гидравлической экономии связан с портом пилот-сигнала. Положительное направление блока - от порта L к порту B. Положительное давление в порту P открывает клапан.
Динамика клапана аппроксимируется введением запаздывания первого порядка между датчиками давления и перемещением регулируемого элемента управления диафрагмой.
Инерция, трение или гидравлические силы, действующие на орган управления клапаном, не учитываются.
