В этом примере показано, как моделировать системы, охватывающие электрические и механические области. Вы научитесь моделировать физические компоненты с помощью Simscape™ блоков, соединять их с реалистичной моделью, использовать блоки Simulink ®, а затем моделировать и изменять модель двигателя .
Модель основана на модели Faulhaber серии 0615 DC-Micromotor. Модель использует эквивалентные параметры цепи для 1.5V двигателя для проверки указанной производителем частоты вращения без нагрузки, тока без нагрузки и крутящего момента остановки. Модель можно использовать для оценки характеристик двигателя в данном приложении путем добавления требуемой модели механической нагрузки.
Чтобы открыть пример модели двигателя постоянного тока с постоянным магнитом, введите ssc_dcmotor в окне команд MATLAB ®.
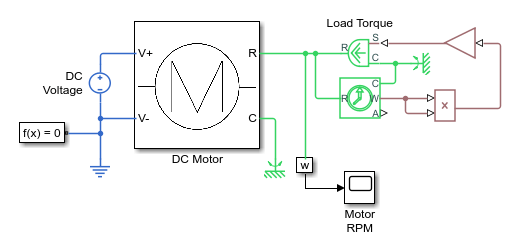
Главная модель
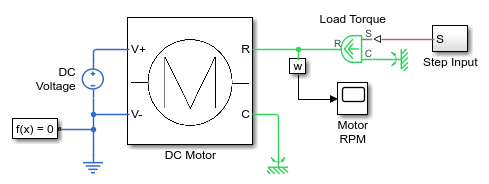
Модель содержит подсистему двигателя постоянного тока с двумя электрическими и двумя механическими вращательными портами.
Для улучшения читаемости блок-схем в каждом домене Simscape используется определенный цвет и стиль линий по умолчанию для линий соединения. На этой блок-схеме, например, электрическая цепь обозначается темно-синим цветом соединительных линий, в то время как соединительные линии между механическими вращающимися портами светло-зеленые. Физические сигнальные линии коричневые.
Электрические порты двигателя подключаются к электрической цепи, которая состоит из электрического опорного блока, представляющего электрическое заземление, и источника постоянного напряжения 1,5 В.
На механической стороне опорный блок механического вращения представляет опорную точку для других элементов.
Нагрузка двигателя представлена блоком «Крутящий момент нагрузки», который является блоком «Идеальный источник крутящего момента». С одной стороны он соединен с опорным блоком механического вращения, а с другой - с валом двигателя. Крутящий момент нагрузки задается подсистемой ступенчатого ввода, подключенной через физический сигнал к управляющему порту S блока крутящего момента нагрузки.
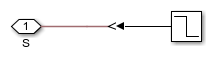
Подсистема Step Input содержит обычный источник Simulink Step, обеспечивающий управляющий сигнал. Блок преобразователя Simulink-PS преобразует управляющий сигнал в физический сигнал и применяет его к порту управления блока нагрузки крутящего момента через блок порта соединения S.
Диаграмма также содержит блок конфигурации решателя, который требуется в любой модели Simscape. Он содержит параметры, относящиеся к числовым алгоритмам моделирования Simscape.
Дважды щелкните подсистему двигателя постоянного тока, чтобы открыть ее.
Подсистема двигателя постоянного тока
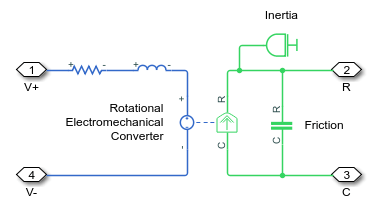
Двигатель состоит из электрической цепи и механической вращательной цепи, соединенных блоком вращательного электромеханического преобразователя. Электрическая цепь состоит из резисторного блока и индукторного блока. Он содержит два электрических порта, соответствующих V + и V- электрическим выводам двигателя. Механическая схема содержит блок вращательного трения, блок инерции и два механических поворотных порта С и R, соответствующих корпусу двигателя и ротору соответственно. Обратите внимание, как порты C и R блока вращательного трения и блока вращательного электромеханического преобразователя соединены с портами C и R двигателя, чтобы сохранить правильное направление переменных в физической сети.
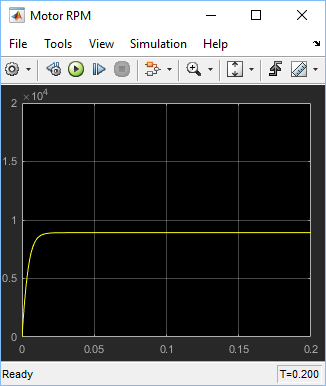
Дважды щелкните область RPM двигателя, чтобы открыть ее. Во время моделирования это окно отображает скорость вала как функцию времени.
Щелкните![]() , чтобы начать моделирование. Решатель Simscape оценивает модель, вычисляет начальные условия и выполняет моделирование. Этот процесс может занять несколько секунд. Сообщение в левом нижнем углу окна модели предоставляет статус.
, чтобы начать моделирование. Решатель Simscape оценивает модель, вычисляет начальные условия и выполняет моделирование. Этот процесс может занять несколько секунд. Сообщение в левом нижнем углу окна модели предоставляет статус.
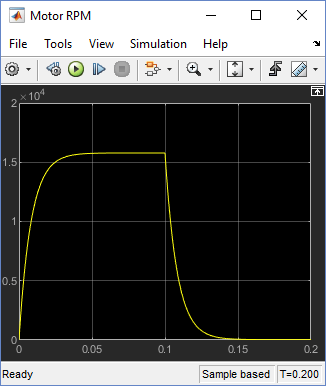
Проверьте результаты моделирования в окне объема RPM двигателя.
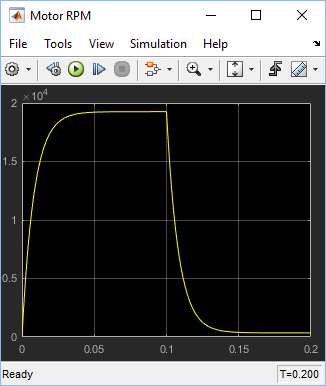
Первые 0,1 секунды двигатель не имеет внешней нагрузки, а скорость нарастает до значения холостого хода. Затем через 0,1 секунды крутящий момент лафета прикладывается в качестве нагрузки к валу двигателя. Увеличение объема данных об оборотах двигателя показывает, что модель соответствует параметрам изготовителя для частоты вращения без нагрузки и крутящего момента остановки.
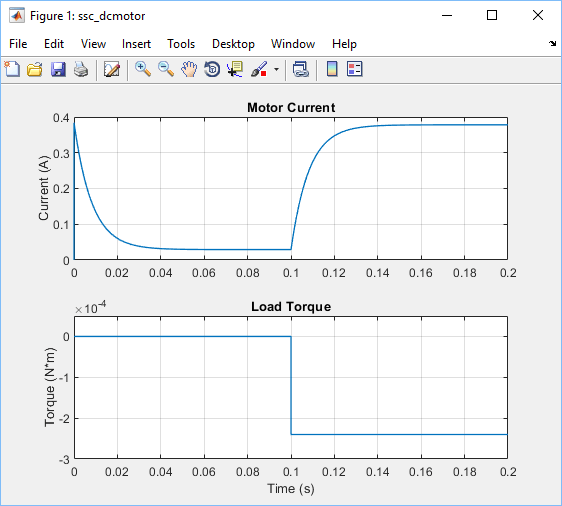
В примере модели также показано, как можно использовать код MATLAB для анализа результатов моделирования. Для построения графика текущего крутящего момента и крутящего момента нагрузки щелкните значок Plot гиперссылка в аннотации модели. Ток, показанный на рисунке, соответствует параметрам изготовителя для тока без нагрузки.
Уменьшите напряжение питания до 1,25 В (чтобы имитировать работу батареи) и измените крутящий момент нагрузки, чтобы найти максимальный крутящий момент при этом пониженном напряжении.
Дважды щелкните на блоке источника напряжения постоянного тока. Установить постоянное напряжение в 1.25 V.
Запустите моделирование. Обратите внимание на влияние пониженного напряжения на скорость холостого хода.
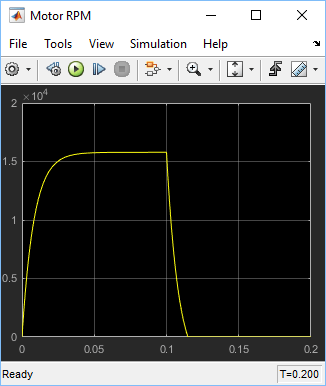
Попробуйте изменить крутящий момент нагрузки, чтобы найти максимальный крутящий момент при этом пониженном напряжении. Откройте подсистему Step Input и дважды щелкните блок Step source. Введите другие конечные значения для входного сигнала и повторите моделирование.
На следующей иллюстрации показаны результаты моделирования для конечного значения, установленного равным -0.2e-3, что соответствует (1.25/1.5)*0.24mNm, поскольку величина кривой крутящий момент-частота вращения пропорциональна напряжению для двигателя постоянного тока.
Замените источник крутящего момента простой механической нагрузкой, например, вентилятором, для которого крутящий момент определяется alpha*speed^2, где alpha является -1e-10 Нм/( рад/с) ^ 2.
Удалите подсистему Step Input из модели.
В библиотеке блоков Simscape откройте «Foundation Library» > «Mechanical» > «Mechanical Sensors».
Перетащите блок «Датчик идеального вращательного движения» в окно модели.
Откройте Foundation Library > Физические сигналы > Функции.
Перетащите блок PS Product и блок PS Gain в окно модели.
Соедините блоки, как показано на следующем рисунке. Чтобы повернуть блок, выделите его и нажмите клавиши Ctrl + R.
Дважды щелкните блок PS Gain, чтобы открыть его диалоговое окно. В первом поле рядом с параметром Gain введите значение -1e-10. Во втором выпадающем списке с раскрывающимся списком единиц введите выражение единицы измерения. N*m/(rad/s)^2 и нажмите кнопку ОК.
Выполните моделирование и оцените производительность двигателя с новой нагрузкой.