Возможно, потребуется предоставить производные времени некоторых входных сигналов, особенно если используется явный решатель. Одним из способов обеспечения необходимых входных производных является фильтрация входного сигнала через фильтр нижних частот. Фильтрация входных сигналов делает входной сигнал более плавным и обычно улучшает производительность модели. Дополнительное преимущество состоит в том, что механизм Simscape™ вычисляет производные времени отфильтрованного входного сигнала. Фильтр первого порядка предоставляет одну производную, в то время как фильтр второго порядка предоставляет первую и вторую производные. При использовании фильтрации ввода очень важно выбрать соответствующее значение для постоянной времени фильтра.
Постоянная времени фильтра управляет фильтрацией входного сигнала. Отфильтрованный ввод следует за истинным вводом, но сглаживается с запаздыванием в порядке выбранной временной константы. Установите постоянную времени на значение, не превышающее наименьший интервал времени в интересующей вас системе. При выборе очень малой постоянной времени отфильтрованный входной сигнал ближе к истинному входному сигналу. Однако этот отфильтрованный входной сигнал увеличивает жесткость системы и замедляет моделирование.
Вместо использования входной фильтрации можно предоставить производные времени для входного сигнала непосредственно в качестве дополнительных физических сигналов.
Для кусочно-постоянных сигналов можно также явно установить входные производные на ноль.
Вы можете управлять тем, как вы предоставляете производные времени для каждого входного сигнала, настраивая блок Simulink-PS Converter, подключенный к этому входному сигналу:
Откройте диалоговое окно Блок преобразователя Simulink-PS.
Перейдите на вкладку Обработка ввода (Input Handling).
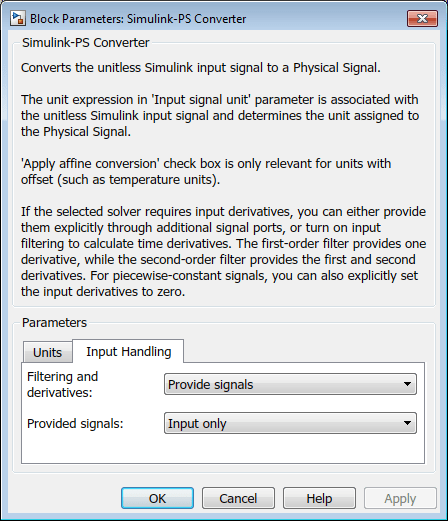
При добавлении в модель нового блока Simulink-PS Converter опции обработки ввода по умолчанию: Provide signals и Input onlyи блок имеет один входной порт Simulink ® и один выходной порт физического сигнала.
Чтобы включить фильтрацию входных данных, задайте для параметра Фильтрация и производные значение Filter input, derivatives calculated. Выберите фильтр первого или второго порядка с помощью параметра Порядок фильтрации ввода (Input filtering order) и задайте соответствующее значение параметра Постоянная времени фильтрации ввода (в секундах) для модели.
Чтобы избежать фильтрации входного сигнала, оставьте параметр Фильтрация и производные как Provide signals. Затем установите значение параметра Обеспеченные сигналы:
Input and first derivative - При выборе этой опции на блоке Simulink-PS Converter появляется дополнительный входной порт Simulink, позволяющий подключить производную сигнала, обеспечивающую ввод.
Input and first two derivatives - При выборе этой опции в блоке Simulink-PS Converter появляются два дополнительных входных порта Simulink, которые позволяют подключать сигналы, обеспечивающие входные производные.
Наконец, если входной сигнал является кусочно-постоянным (например, шаг), можно также явно установить входные производные в нуль, выбрав Zero derivatives (piecewise constant) значение параметра Фильтрация и производные.
